CS303 人工智能
Contents
AI Search
- Lecture 1. AI as Search
- Lecture 2. Beyond Classical Search
- Lecture 3. Problem-Specific Search
Machine Learning
- Lecture 4. Principles of Machine Learning
- Lecture 5. Supervised Learning
- Lecture 6. Performance Evaluation for Machine Learning
- Lecture 7. Unsupervised Learning
- Lecture 8. Recommender System
- Lecture 9. Automated Machine Learning
Knowledge and Reasoning
- Lecture 10. Logical Agents
- Lecture 11. First Order Logic
- Lecture 12. Representing and Inference with Uncertainty
- Lecture 13. Knowledge Graph
Lecture 1. AI as Search
Outline
- From searching to search tree
- Uninformed Search Methods
- Heuristic (informed) Search
Search in a Tree ?
概念:最短路径选择,搜索树
通过将所有“图”中的路径展开,可以得到一个搜索树。对树进行全局搜索必然可以得到最短路径。
但是,当图变得复杂时(如一个省的地图,or a state),搜索量极大,全局搜索及其低能。
- Q: What is A Good Search Method?
- Completeness: Does it always find a solution if it exists?
- Optimality: Does it always find the least-cost solution?
- Time complexity: # nodes generated/expanded.
- Space complexity: maximum # nodes in memory.
- In general, time and space complexity depend on:
- $b$ 👉 maximum # successors of any node in search tree. [枝]
- $d$ 👉 depth of the least-cost solution.
- $m$ 👉 maximum length of any path in the state space.
Un-informed Search Methods
How to define “un-informed” ?
- Use only the information available in the problem definition.
- Use NO problem-specific knowledge.
As some algorithms have been learnt in course Algorithm Design and Analysis, we skip them.
BFS
- Completeness? Yes (Suppose $b$ is finite)
- Optimality? Yes (Suppose all edge values are non-negative)
- Time & Space? Both $O(b^{d+1})$
UCS (Uniform-Cost Search)
- Idea
- Expand the cheapest unexpanded node.
- Implementation: a queue ordered by path cost, lowest first.
- Completeness? Yes (Suppose every step costs $\ge \epsilon$)
- Optimality? Yes (Suppose all edge values are non-negative)
- Time & Space? $O(b^{1+\lfloor C^{*}/\epsilon\rfloor})$
- $C^{*}$ : the cost of the optimal solution.
- every action costs at least $\epsilon$.
- Only if all step costs are equal, time/space $=O(b^{d+1})$
DFS
- Completeness? No (fail in infinite-depth space and space with loops.)
- Optimality? No
- Time? $O(b^m)$
- Terrible if $m$ is much larger than $d$.
- Space? $O(bm)$ - linear!
DLS (Depth-Limit Search)
- A variant of DFS: node at depth $l$ has no sucessors.
- Completeness? No
- Optimality? No
- Time? $O(b^l)$
- Space? $O(bl)$
IDS (Iterative Deepening Search)
- Idea
- Apply DLS with increasing limits
- Combine benefit of BFS and DFS
- Completeness? Yes
- Optimality? Yes (Suppose costs of edges are non-negative)
- Time? $O(b^d)$
- $(d+1)b^{0}+ db^{1}+(d-1)b^{2}+\cdots +b^d=O(b^{d})$
- Space? $O(bd)$
Preference when search space is large and depth of solution is unknown.
Bi-directional Search
- Idea: simultaneous
- Replace single search tree with two smaller sub trees.
- Forward tree: forward search from source to goal.
- Backward tree: backward search from goal to source.
- Completeness & Optimality? Like BFS (if BFS used in both trees)
- Time & Space? $O(b^{d/2})$
- Cons: not always applicable
- Reversible actions? [是否可以“由果溯因”?]
- Explicitly stated goal state? [叶子节点代表“结局”,所有结局是否已知?]
Heuristic (informed) Search
Q: What is “Heuristic” ?
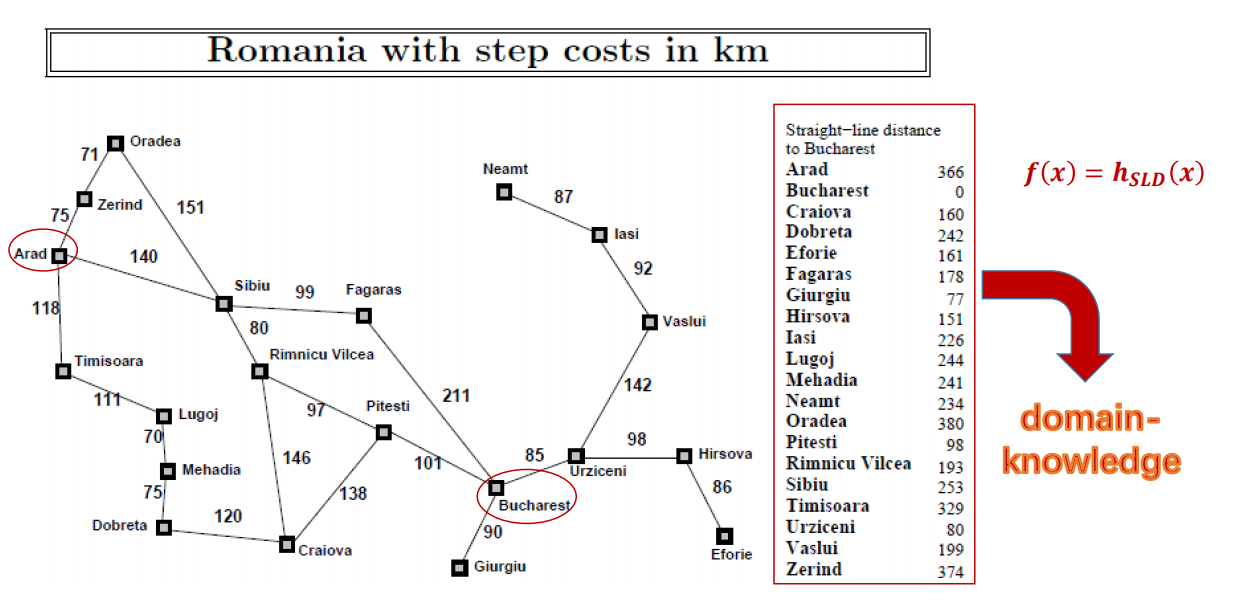
A: Based on algorithm design, it searches the trees with intelligence, making use of domain knowledge.
Q: How to Design the Evaluation Function?
A: It depends (but some advice). Use heuristic function $f(x)$ to estimates the cheapest cost from $x$ to the goal state.
- $h(x)=0$ if $x$ is the goal state
- non-negative
- problem-specific
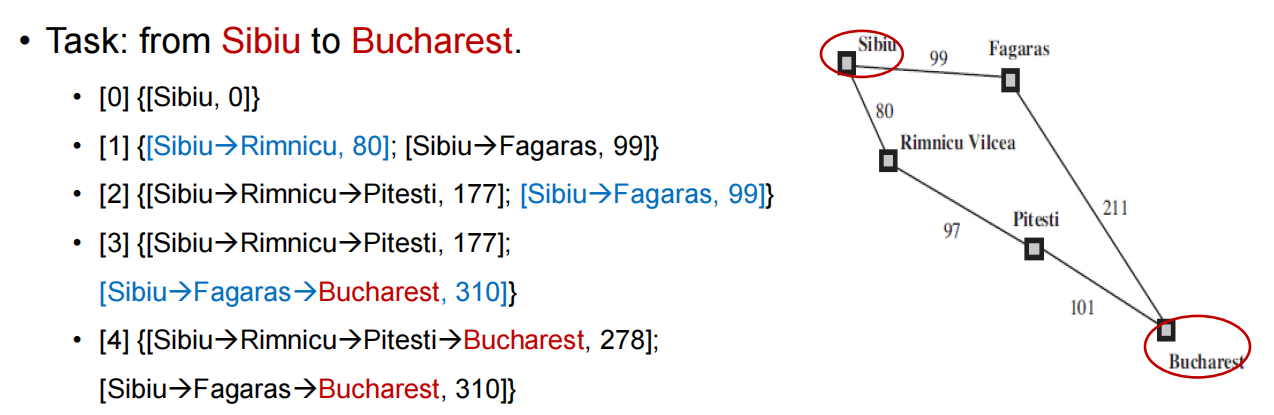
Greedy Best-first Search
- A simple example to describe heuristic function: let’s say $f(x)=h_{SLD}(x)$ , where $h_{SLD}(x)$ is physical distance between two nodes (cities)
- Completeness? Yes (finite space + repeated-state checking)
- Optimality? No
- Time? $O(b^m)$ (In practice, good heuristic gives drastic improvement)
- Space? $O(b^m)$
A* Search
- Idea: avoid expanding paths that are already expensive.
- Expand the node $x$ that has minimal $f(x)=h(x)+g(x)$
- $g(x)$ : cost so far to reach $x$
- $h(x)$ : estimated cost from $x$ to goal
- $f(x)$ : total cost
- Expand the node $x$ that has minimal $f(x)=h(x)+g(x)$
PF(performance) Metrics
- Completeness? Yes
- Optimality? Yes, if $h$ is admissible [取决于启发式算法]
- Time? $O(b^d)$
- Space? $O(b^d)$
Admissible heuristic
- Def. Heuristic function $h$ is admissible if $\forall x \to h(x)\ge h’(x)$, where $h’(x)$ is the true cost from $x$ to goal.
- Search Efficiency of Admissible Heuristic
- For admissible $h_1$ and $h_2$, if $h_2(x)\ge h_1(x)$ for all $n$, then $h_2$ deminates $h_1$ and is more efficient for search.
A* 算法可以认为是学习 AI 的第一基础算法。它明确了 AI 需要具有的首要特性:学习。A* 算法是树/图搜索算法中第一个可以利用“知识”进行决策的算法,不再是像遍历这样“机械、随机”的算法。
Lecture 2. Beyond Classical Search
Outline
- More representations
- General Search Frameworks
- Summary
More representations
Last lecture, we solve the search problem by Searching Tree.
But is there any more efficient data structure in some specific tasks ?
Direct Search in the Solution Space
- Consider that the solution space is continuous, like $\mathbb{R}^{2}$.
- Then if we generate a tree to describe each step, that’s silly.
- Representations of a solution space can be roughly categorized as:
- Continuous
- Discrete: Binary, Integer, Permutation, etc.
- Different representations may favor different search methods, but most of them share a common framework.
General Search Frameworks
- Typical Frameworks:
- Local Search
- Simulated Annealing
- Tabu Search
- Population-based search
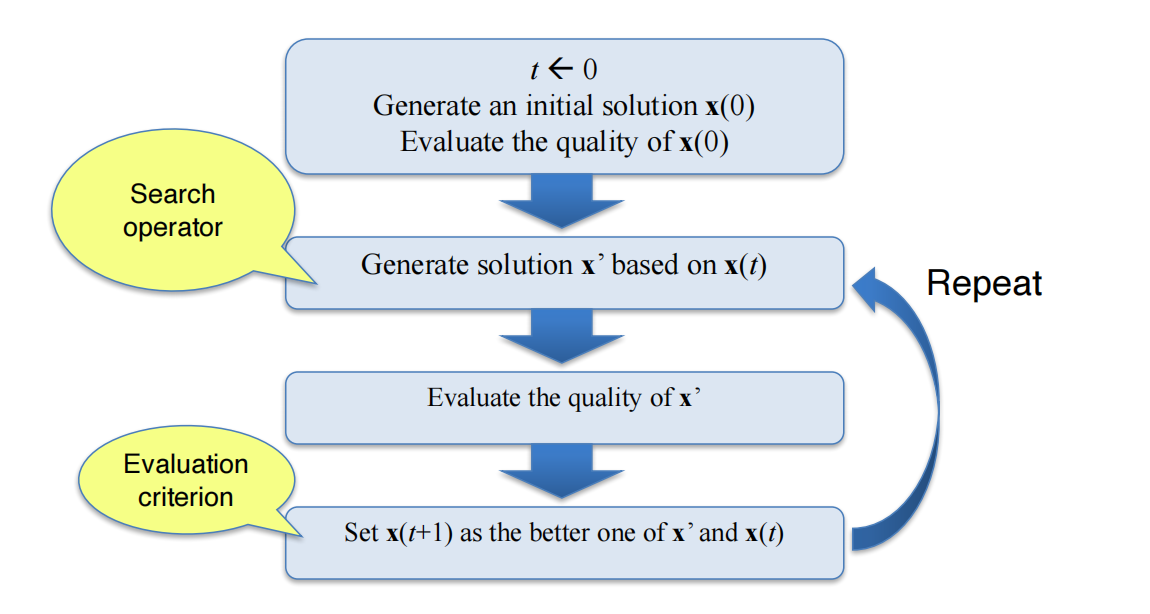
- Two basic issues (differs over concrete search methods):
- search operator (how to generate a new candidate solution)
- evaluation criterion (or replacement strategy)
Typical Search Operators
- A Search Operator generate a new solution based on previous ones.
$
\phi : x\to x’,\forall x,x’ \in \mathcal{X}
$
Now we use continuous case as an example.
Greedy Local Search Framework
- Given a predefined Local Search Operator
- Iteratively generate new solutions
- Always pick the best solution so far, sometimes also known as Hill Climbing.
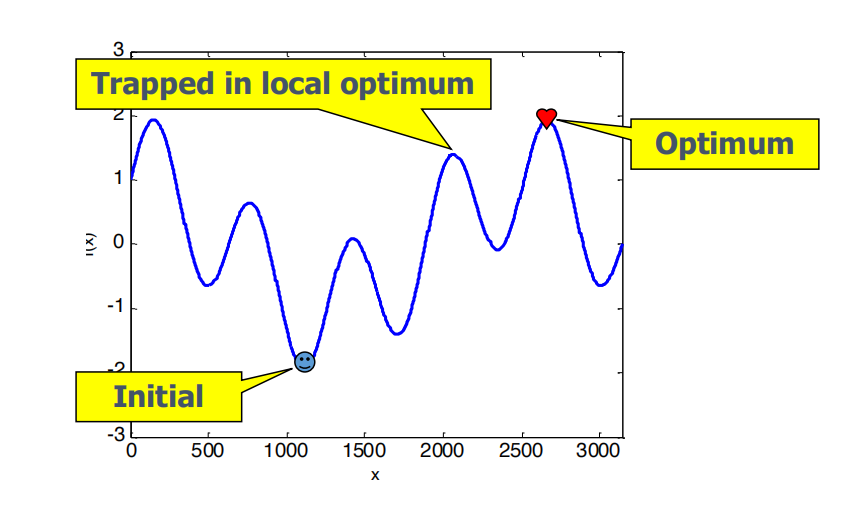
but sometimes trapped in local optimum
SA, Tabu and Bayesian Optimizations
Simulated Annealing
概念:温度,下降率
模拟退火是基于物理退火现象的一种对于贪心策略的优化方法。目的是在一定概率上帮助跳出局部最优的局面。(随机)
该优化方法需要根据实际情况调整超参数:初始温度 $T_0$,结束温度 $T_t$,和温度下降率 $\alpha$。
$
p=\left\{
\begin{array}{cl}
&1 &\text{if } f(x_i) \lt f(x_i’) \\
&\exp{-\frac{f(x_i)-f(x_i’)}{T}} &\text{if } f(x_i) \lt f(x_i’)
\end{array}\right.
$
1 | Set T(0), T(t), alpha |
Tabu
Hill climbing → Tabu Search
- Key idea: Don’t visit the sample candidate solution twice.
- Challenge: How to define the Tabu list?
- Concept:
- Tabu List [禁忌表]
- Tabu Object: items in TL, e.g., in Traveling Salesman Problem (TSP), we can set cities as TO (can be some attributes involved to $f(x)$)
- Tabu Tenure: “Time” that TO stay in TL. 👉 to avoid short loop(TT↓) or low PF(TT↑)
- Aspiration Criteria: to choose TO with best PF, and pop it out from TL.
通过维持一个禁忌表的方式,在一定程度上接收比当前最优解要差的结果,从而跳出局部最优
Bayesian Optimizations
Hill climbing → Bayesian Optimizations
- Key idea: Build a model to ”guess” which solution is good.
- Challenge:
- model building is non-trivial
- may need lots of data to build the model, limited to low-dimensional problem
涉及机器学习内容
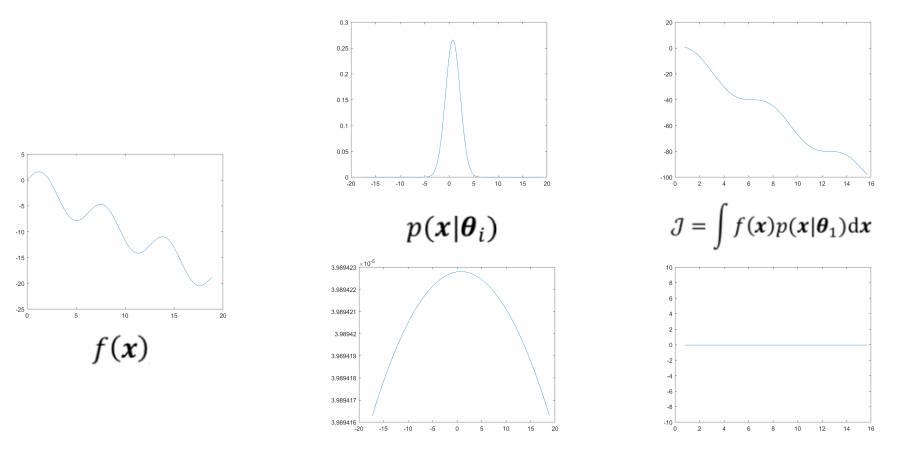
Population-based Search
- Idea: Since we sample from a probability distribution, why 1 at a time?
- Evolutionary Algorithm:
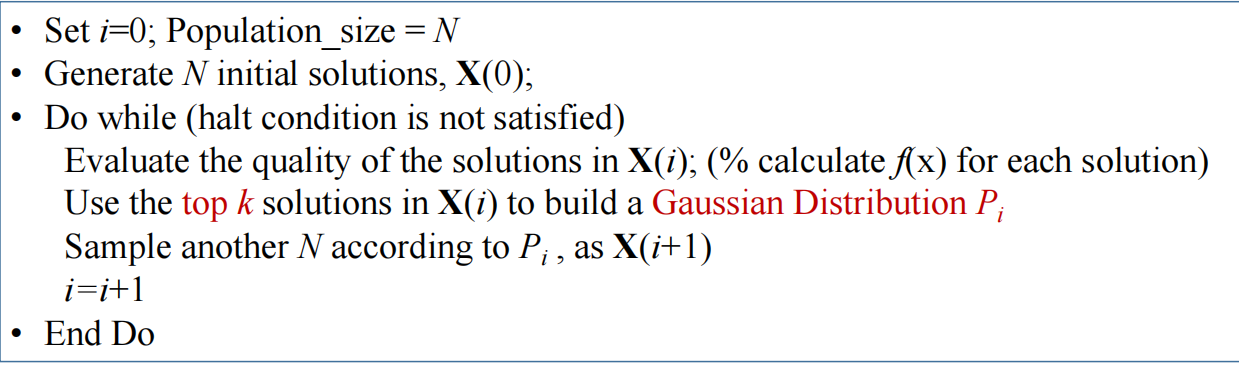
- Seeking a good distribution: maximize the following “objective function”:
$
\mathcal{J}=\int f(x)p(x|\theta_{1}) dx
$
- where $p(x|\theta_{1})$ is prob density function parameterized by $\theta_{1}$
- Using “Population” help making objective function “smooth”
- Suppose we now converge to some (global or local) optimum
- If run the algorithm again, we hope the algorithm (i.e., the distribution corresponding to the final population) converge to a different optimum (and thus a different PDF).
$
\mathcal{J}= \sum_{i=1}^{\lambda} \int f(x)p(x|\theta_{i}) dx - \sum_{i=1}^{\lambda} \sum_{j=1}^{\lambda} C(\theta_{i}, \theta_{j})
$
- where $C(\theta_{i},\theta_{j})$ is similarity of the two PDFs [概率密度分布]
EA Applications
- N-Queen Problems [通过“杂交”操作生成新组合,每次进行多个组合计算]
- 鸟巢设计,动车车头设计等
Summary
- This lecture is talking about general-purpose search frameworks, rather than search algorithm.
- When addressing a specific problem, heuristics derived from domain knowledge needs to be incorporated in forms of search operators to obtain the best performance.
- For some problem of great importance, mature application-specific optimization approaches have been developed such that algorithm design from scratch is not needed.
Therefore, next lecture will talk about some problem-specific search algorithms.
Lecture 3. Problem-Specific Search
Outline
- Make Search Algorithms Less General
- Gradient-based Methods for Numerical Optimization
- Quadratic Programming Problems
- Constraint Satisfaction Problems
- Adversarial Search
Make Search Algorithms Less General
Why we need problem-specific search ?
- When designing an algorithm for a problem (class), taking the problem characteristics into account usually helps us get the desired solution by searching only a part of the search/state space, making the search more efficient.
- consider the ubiquitous (普遍的) optimization problems:
$
\begin{array}{ll}
&\text{maximize} &f(x) \\
&\text{subject to:} &g_i(x)\le 0,\ i=1\cdots m \\
& &h_j(x)=0,\ j=1\cdots p
\end{array}
$
- What is “problem characteristic”? Most basically:
- What is $x$ ?
- What is $f$ ?
- Does $f$ fulfill some properties that would lead to a more efficient search?
Gradient-based Methods for Numerical Optimization
- Suppose the objective function $f(x_1 , y_1, x_2, y_2, x_3, y_3)$ is continuous and differentiable (thus the gradient could be calculated)
- Compute:
$
\nabla f=\left( \large{\frac{\partial f}{\partial x_1}, \frac{\partial f}{\partial y_1}, \frac{\partial f}{\partial x_2}, \frac{\partial f}{\partial y_2}, \frac{\partial f}{\partial x_3}, \frac{\partial f}{\partial y_3}} \right)
$
- to increase/reduce $f$, e.g., by $x \leftarrow x + \alpha \nabla f(x)$ [梯度下降]
Quadratic Programming Problems
- The objective function is a quadratic(二次) function of $x$
- The constraints are linear functions of $x$
$
\begin{array}{ll}
& &\min f(x)=q^{T}x + \frac{1}{2}x^{T}Qx \\
&\text{s.t.} & Ax = a,\ Bx \le b,\ x\ge 0 \\
\end{array}
$
- When there is no constraint, we can solve this problem by differenctiation. ($f’(x)=0$)
- But when there are constraints, search is still needed (Recall: Lagrange multiplier)
引出接下来的问题:CSP
Constraint Satisfaction Problems (CSP)
- Standard Search Problem
- state is a “black box” 👉 any old data structure that supports goal test, eval, successors
- CSP
- state is defined by variable $X_i$ with values from domain $D_i$
- goal test is a set of constraints specifying allowable combinations of values for subsets of variables
例:地图上色问题。限制:相邻区块不能上同一颜色。
假设两个区块 $X=\{A,B\}$,四种颜色 $D=\{R, G, B, Y\}$,原本可以有 16 种组合,但是由于限制条件只有 12 种。
Characteristics of CSPs
Real-world CSPs
- Assignment problems
- Timetabling problems
- Hardware configuration
- Floorplanning
- Factory scheduling
- ……
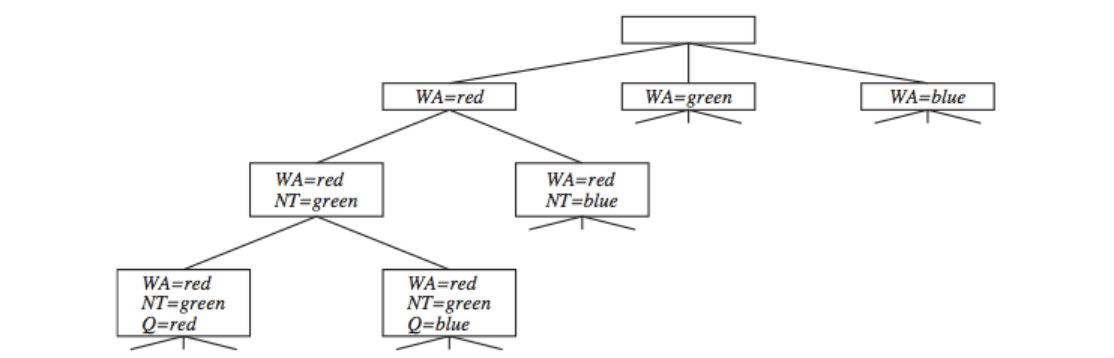
Commutativity
First character
- Commutativity help us formulate the search tree (only 1 variable needs to be considered at each node in the search tree).
Constraint Graph
Second
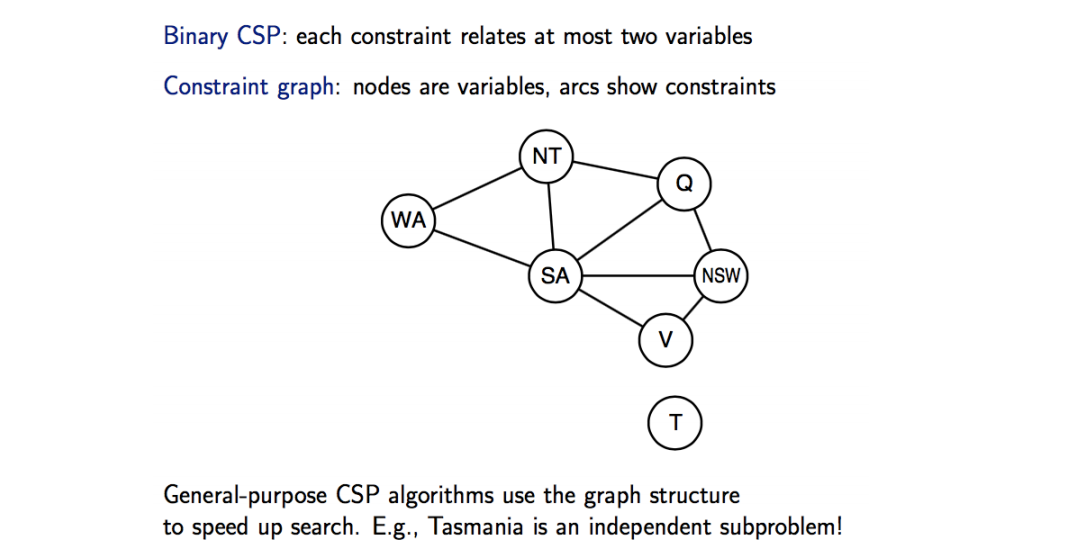
Inference
- A constraint graph allows the agent to do inference in addition to search.
- Inference basically means checking local consistency (or detecting inconsistency)
- Node consistency
- Arc Consistency
- Path Consistency
- K-consistency
- Global consistency
- Inference helps prune the search tree, either before or during the search.
Backtracking Search for CSP
1 | def backtracking_search(csp) -> (solution/failure): |
- More improvement can be done:
- E.g. in
Select_Unassigned_Variable, design some strategies to choose the optimal variable - E.g. maintain a conflict set, etc.
- E.g. in
Adversarial(对抗性) Search
以一个游戏为例:
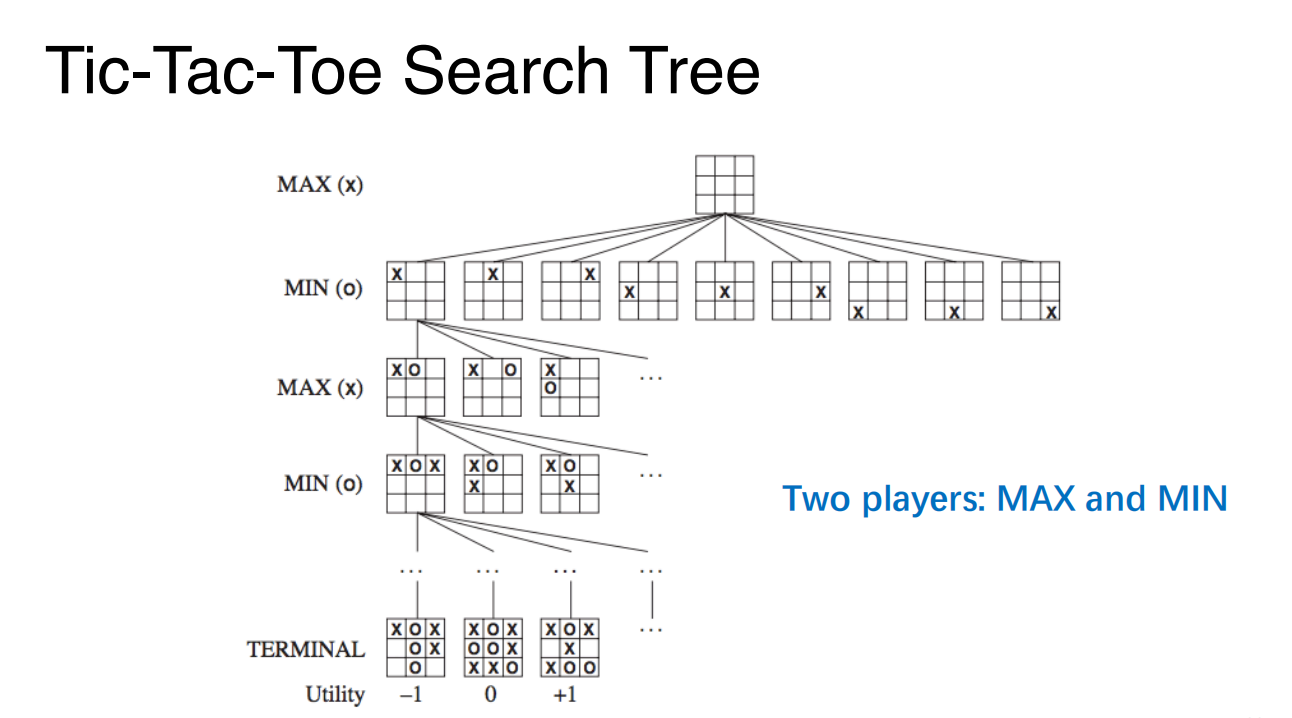
Algorithm. Minimax Algorithm
- Idea
- Assume the game is deterministic and perfect information is available
- For player “MAX”, choose the move to position the highest minimax value
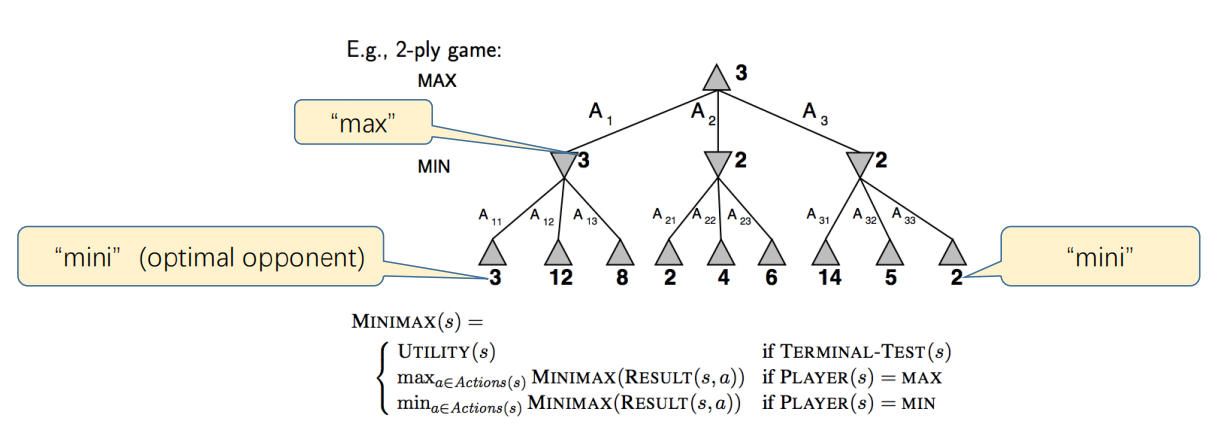
- Perform a complete(later we will optimize this) depth-first search of the game tree.
- Recursively compute the minimax values of each successor state.
- Maximize the worst-case outcome for MAX.
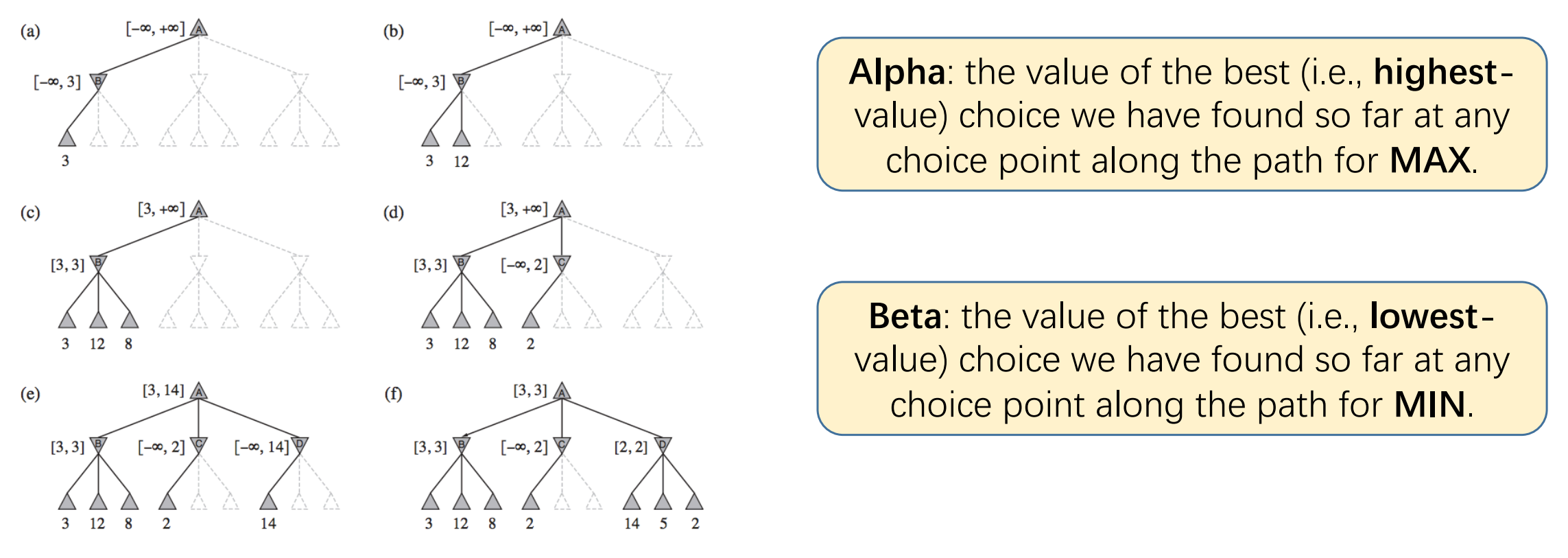
Alpha-Beta Pruning
- Idea: Remove (unneeded) part of the minimax tree from consideration.
1 | # AB Search |
- Explanation:
- when we search maximum for “MAX”, we first suppose “MAX” choose action a, and “MIN” make perfect action (minimum in “MAX” view), assuming that value is 3.
- Then “MAX” will focus on range $[3, \infty]$.
- We then suppose “MAX” choose action b, and “MIN” make a choice for an action value 2.
- We’re sure that “MIN” ultimately will make a choice having value $\le 2$ (optimal for “MIN”). However, “MAX” only accept actions value $\ge 3$, so action b won’t be accepted.
- Therefore, we can stop “MIN” from searching the other actions.
- So we found that Alpha-Beta Pruning have limitation:
- games with more than 2 players ?
- 2-players game that is not zero-sum ? [非敌对?]
- Minimax or Alpha-Beta Pruning don’t apply ?
- And sometimes the order of “actions” affects the PF.
Summary on Search
- How to represent the search space?
- Search Tree (state space)
- Solution space
- What is the objective function and constraint, and algorithm in textbook already good enough?
- Which algorithmic framework to choose?
- Tree search, e.g., Un-informed Search, Heuristic Search (A*…)
- Direct search in the solution space, e.g., Hill Climbing, Simulated Annealing, Genetic Algorithm…
- How to define concrete components of the algorithm framework?
- General-purpose operators in literature
- Problem-specific operators, designed based on domain knowledge
Always trade-off among solution quality, efficiency, and your domain knowledge
Lecture 4. Principles of Machine Learning
Outline
- What is Learning
- Key Questions for Learning
- Learning Paradigms and Principles
What is Learning?
- Machine Learning: Given some observations (data) from the environment, how could an agent improve its agent function?
- Intuitive assumptions
- the data share something in common
- “something” could be obtained by an algorithm/program
Two simple methods
A Naive Parametric Method —— Bayesian Formula
- Classify a data to the class with the highest posterior probability
- Assumption: data follows independent identically distribution
$
\begin{array}{c}
&P(w_j|x)=\frac{p(x|w_j)p(w_j)}{p(x)} \\
&P(w_2|x)\gt P(w_1|x) \Leftrightarrow \ln{p(x|w_2)}+\ln{p(w_2)} \gt \ln{p(x|w_1)}+\ln{p(w_1)} \\
\end{array}
$
- “Parametric”: the assumption on the probability density function (PDF).
- Parametric methods usually do not involve parameters to fine-tune, while Nonparametric methods usually do.
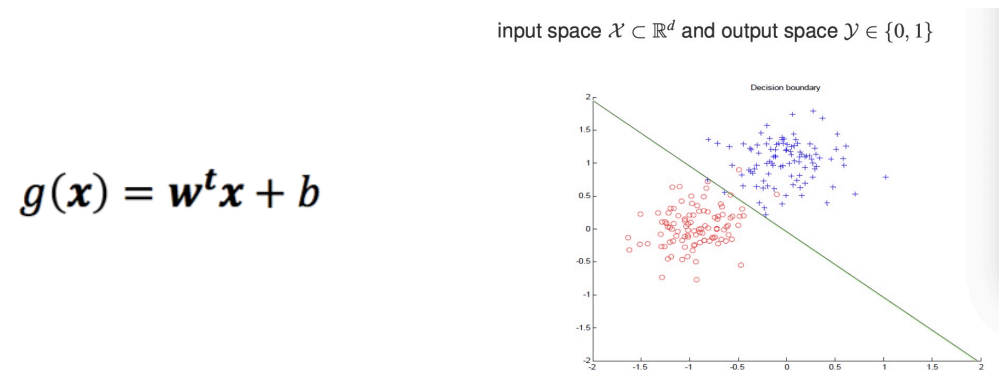
A Linear Function
- Find a straight line/hyper-plane to separate data from different classes.
Key Questions for Machine Learning
- What is the format of the data? (data representation)
- What does the agent function look like? (model representation)
- How to measure the “improvement”? (objective function)
- What is the learning algorithm? (to get a good agent function)
Learning Paradigms and Principles
- Learning Principles: Generalization!
- the learned agent function is expected to be able to handle previously unseen situations.
- Learning Paradigms (范式)
- A Machine Learning process typically involves two phases
- Training: build the agent function
- Testing/Inference: test the agent function/deploy the agent function in real use.
- Different ML techniques may use different training/learning paradigms
- Supervised Learning: the correct answer is available to the learning algorithm.
- Reinforcement Learning: the only feedback is the reward of an output, e.g., the output is correct or not (the correct answer is not given).
- Unsupervised Learning: no correct answer is available
- A Machine Learning process typically involves two phases
Lecture 5. Supervised Learning
注意:以下内容部分与课程 MA234 大数据导论与实践相重合!
Outline
- LDA
- SVM
- ANN (NN)
- DT
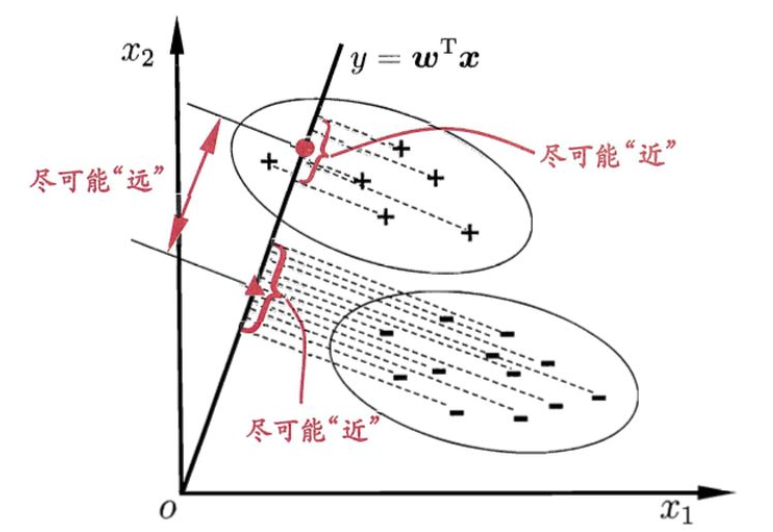
Linear Discriminant Analysis
- Idea: Viewing each datum to lie in a Euclidean space, find a straight line (a linear function) in the space (recall the example used in the last lecture), where the data projection on this line/plane can be well separate according to their label.
- Let’s learn some Maths:
- Given dataset $D=\{ (\mathbf{x}_i, y_i) \}^{m}_{i=1}$, $y_i \in \{0,1\}$
- Suppose $X_i$ is the data subset with label $i\in \{0,1\}$, $\mathbf{\mu_i}$ is the mean vector, $\Sigma_i$ is the Covariance Matrix
- Then the projection of samples in two classes are $w^T \mu_0$, $w^T \mu_1$
- And the covariance within two classes are $w^T\Sigma_0 w$, $w^T\Sigma_1 w$
- Trying to make projections of data in the same class closer, and in different classes farther, we describe the objective function $J$ in this way:
$
\begin{array}{rcl}
\text{define within-class scatter matrix:} &\mathbf{S_w}&=\mathbf{\Sigma_0}+\mathbf{\Sigma_1} \\
&&=\sum_{x\in X_0}(\mathbf{x}-\mathbf{\mu_0})^T+\sum_{x\in X_1}(\mathbf{x}-\mathbf{\mu_1})^T \\
\text{define between-class scatter matrix:}&\mathbf{S_b}&=(\mathbf{\mu_0}-\mathbf{\mu_1})(\mathbf{\mu_0}-\mathbf{\mu_1})^T \\
\text{Then we get objective function:}&J&=\large\frac{|| w^T\mathbf{\mu_0}-w^T\mathbf{\mu_1} ||^{2}_{2}}{w^T\Sigma_0 w+w^T\Sigma_1 w} \\
&&=\large\frac{w^T (\mathbf{\mu_0}-\mathbf{\mu_1})(\mathbf{\mu_0}-\mathbf{\mu_1})^T w}{w^T (\Sigma_0+\Sigma_1)w} \\
&&=\large\frac{w^T \mathbf{S_b} w}{w^T \mathbf{S_w} w}
\end{array}
$
- So we get what LDA wants to maximize (also called generalized Rayleigh quotient)
- then we’re going to optimize this function to obtain an easy form:
$
\begin{array}{rl}
&\min_{\mathbf{w}} -\mathbf{w}^T\mathbf{S_b} \mathbf{w} \\
&s.t.\ \mathbf{w}^T\mathbf{S_w} \mathbf{w}=1 \\
\text{use Langrange Multiplexer: }&\mathbf{S_b}\mathbf{w}=\lambda\mathbf{S_w}\mathbf{w} \\
\text{Aware that } &\mathbf{S_b}\mathbf{w} \text{ always has same direnction as } (\mathbf{\mu_0}-\mathbf{\mu_1}) \\
\text{Let }&\mathbf{S_b}\mathbf{w} = \lambda (\mathbf{\mu_0}-\mathbf{\mu_1}) \\
\therefore&\mathbf{w}=\mathbf{S_w}^{-1} (\mathbf{\mu_0}-\mathbf{\mu_1})
\end{array}
$
In practice, it’s more likely to represent $\mathbf{S_w}$ as form of Singularity Decomposition: $\mathbf{U}\mathbf{\Sigma}\mathbf{V}^T$.
So that we can get $\mathbf{S_w}^{-1}$ by computing $\mathbf{S_w}^{-1}= \mathbf{V}\mathbf{\Sigma}^{-1}\mathbf{U}^T$
- This method is also practical in multi-classification task
- by computing $\mathbf{W}\in \mathbb{R}^{d\times (N-1)}$
- Objective function: $\max_{W} \large\frac{tr(W^T S_b W)}{tr(W^T S_w W)}$
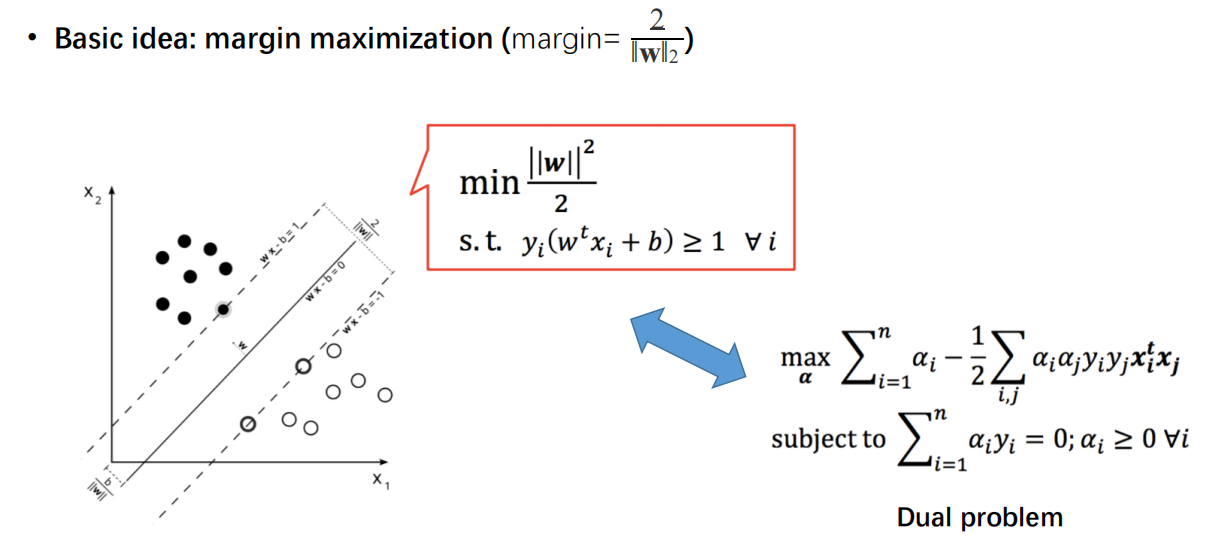
Support Vector Machine
- Basic idea: margin maximization
- the minimum distance between a data point to the decision boundary is maximized.
- intuitively, the safest and most robust
- support vectors: datapoints the margin pushes up
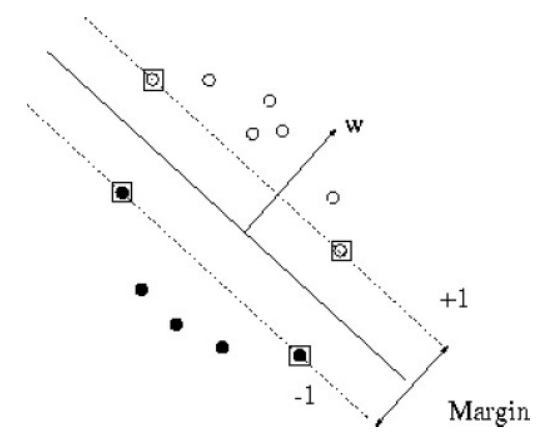
- decision boundary: $<\mathbf{w}, \mathbf{x}> +b = 0$
- Kernel SVM: for non-linearlity
- RBF
- Polynomial
- Sigmoid
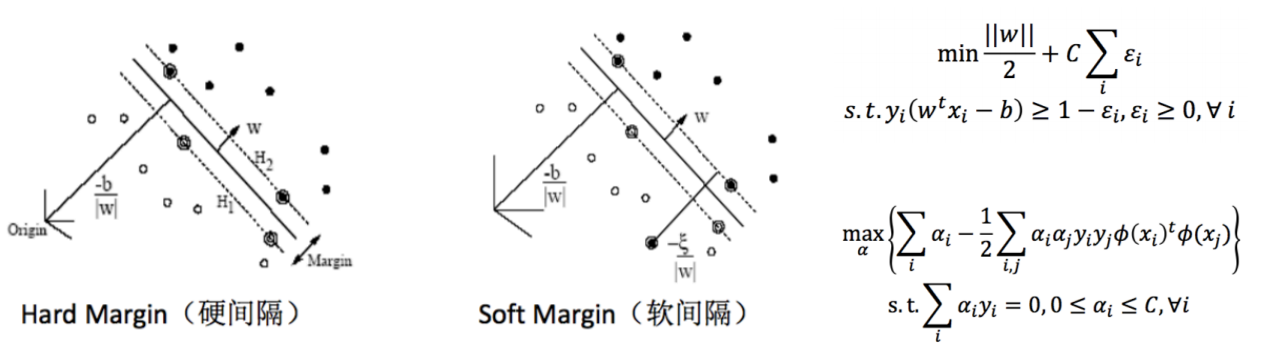
- Soft Margin SVM
- Even with kernel trick, it is hardly to guarantee that the training data are linearly separable, thus a soft margin rather than hard margin is used in practice.
Artificial Neural Networks
- A highly nonlinear function that mimic the structure of biological NN.
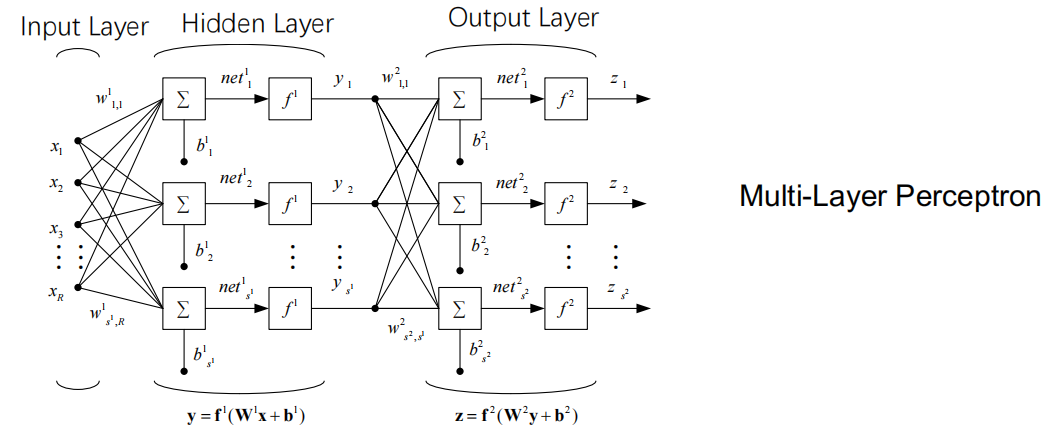
Training NN
- Optimize weights to minimize the Loss function
$
J(w)=\frac{1}{2} \sum_{k=1}^{c}(y_k-z_k)^2=\frac{1}{2} ||\mathbf{y}-\mathbf{z} ||^{2}
$
- Training algorithm: gradient descent, with Back Propagation(BP) algorithm as a representative example.
BP
- Update weights between output and hidden layers
$
\nabla w_{ji}=-\eta\frac{\partial{J}}{ \partial{w_{ji}}}
$
- Update weights between input and hidden layers
$
\frac{\partial{J}}{ \partial{w_{ki}}}=\frac{\partial{J}}{ \partial{net_{k}}} \cdot \frac{ \partial{net_{k}}}{ \partial{w_{ki}}} = -\delta_{k}\frac{ \partial{net_{k}}}{ \partial{w_{ki}}}
$
- Apply in BP algorithm
- initial $D=\{ (\mathbf{x_1},y_1), \cdots, (\mathbf{x_m}, y_m) \}$ and learning rate $\eta$
1 | while Optimality conditions are not satisfied: |
Some issues
- Universal Approximation Theory
- Fully connected NN (MLP) with more than 1 hidden layer is very difficult to train
- etc.
Decision Tree
- A natural way to handle nonmetric data (also applicable to real-valued data).
- Tree searching metrics
- Entropy: $i(N) = -\sum_{i}p(w_i)\log{p(w_i)}$
- Variance: $i(N) = 1 - \sum_{i}p^2(w_i)$
- Misclassification rate: $i(N) = 1 - \max_{i}p(w_i)$
How to contruct a DT ?
- Start from the root, keep searching for a rule to branch a node.
- At each node, select the rule that leads to the most significant decrease in impurity (similar to gradient descent).
- $\Delta i(N) = i(N) - p_L i(N_L) - (1-p_L)i(N_R)$
- When the process terminates, assign class label to the leaf nodes.
- label a leaf node with the label of majority instances that fall into it.
How to control the complexity ?
- Setting the maximum height of the tree (early stopping)
- Introduce the tree height (or any other complexity measure as a penalty)
- Fully grow the tree first, and then prune it (post processing)
Lecture 6. Performance Evaluation for Machine Learning
Outline
- Brief view
- Performance Metrics
- Estimating the Generalization
Brief view
- Be careful when choosing your objective function, two principles:
- Consistent with the user requirements?
- Existing easy-to-use algorithm to optimize it (to train the model)?
- Do internal tests as much as possible
- estimate the generalization performance as accurate as possible.
- Can only reduce rather than remove risk. There is no guarantee in life.
Performance Metrics
Review MA234.
- T & F : represents truth of label (标签是否真实)
- P & N : represents aspect of label (标签的正反两面)
- And there’re 4 cases: TP, TN, FP, FN
- Several metrics:
- accuracy 👉 bad when samples are imbalanced
- precision
- Recall
- F-measure ($F_1$) $=\large\frac{2\times \text{Precision} \times \text{Recall}}{\text{Precision} + \text{Recall}}$
细节请参考大数据导论与实践(二)
- ROC 👉 TPR / FPR
- AUC : slope of ROC, good PF when $AUC\gt 0.75$
Estimating the Generalization
- Generalization performance is a random variable.
- Split the data in hand into training and testing subsets.
- Random Split
- Cross-validation
- Bootstrap
- Collecting the test performance for many times, calculate the average and standard deviation.
- Do statistical tests (check your textbook on statistics)
Lecture 7. Unsupervised Learning
Outline
- Why Unsupervised ?
- Clustering
- K-Means
- Dimensionality Reduction
Why Unsupervised ?
- In practice, it might neither be tractable to collect sufficient labelled data
- Instead, it is relatively easy to accumulate large amount of unlabeled data.
Supervised vs. Unsupervised
- Share the same key factors, i.e., representation + algorithm + evaluation
- For supervised learning, since ground-truth is available for the training data, the evaluation (objective function) can be said as objective.
- For unsupervised learning, the evaluation is usually less specific and more subjective.
- It is more likely that an unsupervised learning problem is ill-defined and the learning output deviate from our intuition.
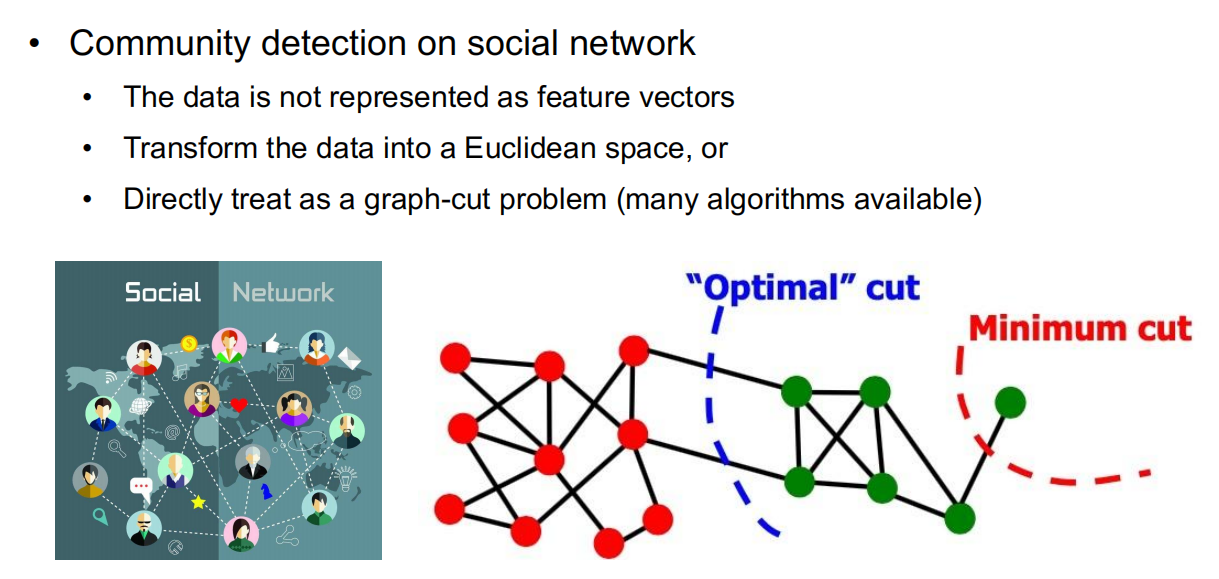
Clustering
- Def. a typical ill-defined problem as there is no unique definition of the similarity between clusters.
- Idea: gathering similar data into one class
- e.g. Objective Function (to minimize distance)
$
\begin{array}{}
J= \underset{i=1}{\overset{k}{\sum}} \underset{x \in D_i }{\sum} || \mathbf{x} - \mathbf{m_i} ||^2 \\
i.e. J = \frac{1}{2} \underset{i=1}{\overset{k}{\sum}} n_i \underset{x,x’ \in D_i }{\sum} || \mathbf{x}-\mathbf{x’} ||^2
\end{array}
$
Naive Approach
- Top-down: following the decision tree idea to split the data recursively.
- Bottom-up: recursively put two instances (or “meta-instances”) into the same group
- Basically you need to define similarity metric (e.g., Euclidean distance) first.
层次聚类?
K-Means
Algorithm
- Given a predefined $K$
- Randomly initialize $K$ cluster centers
- Assign each instance to the nearest center
- Update the each center as the mean of all the instances in the cluster
- Repeat Step 1-3 until the centers do not change any more
Not only similarity metric, but also needs calculating of the average.
Application: Clustering for Graph Data
Dimensionality Reduction
Principle Component Analysis
- Given a n-by-d data set, can we map it into a lower dimensional space with a linear transformation, while only introduce the minimum information loss?
- Suppose we want to reduce data dimension from $n$ to $k$
- Init a dataset: $X=\{x_1, x_2, \cdots , x_m\}$
- Calculate the mean value and minus it (decentralize)
- Calculate the covariance matrix by $C= \frac{1}{n}XX^T$
- Calculate the eigenvalues and corresponding eigenvectors
- Sort the eigenvectors by eigenvalues (large to small) and select the top $k$ as eigenvector matrix $P$
- $Y=PX$ to get new data.
Locally Linear Embedding
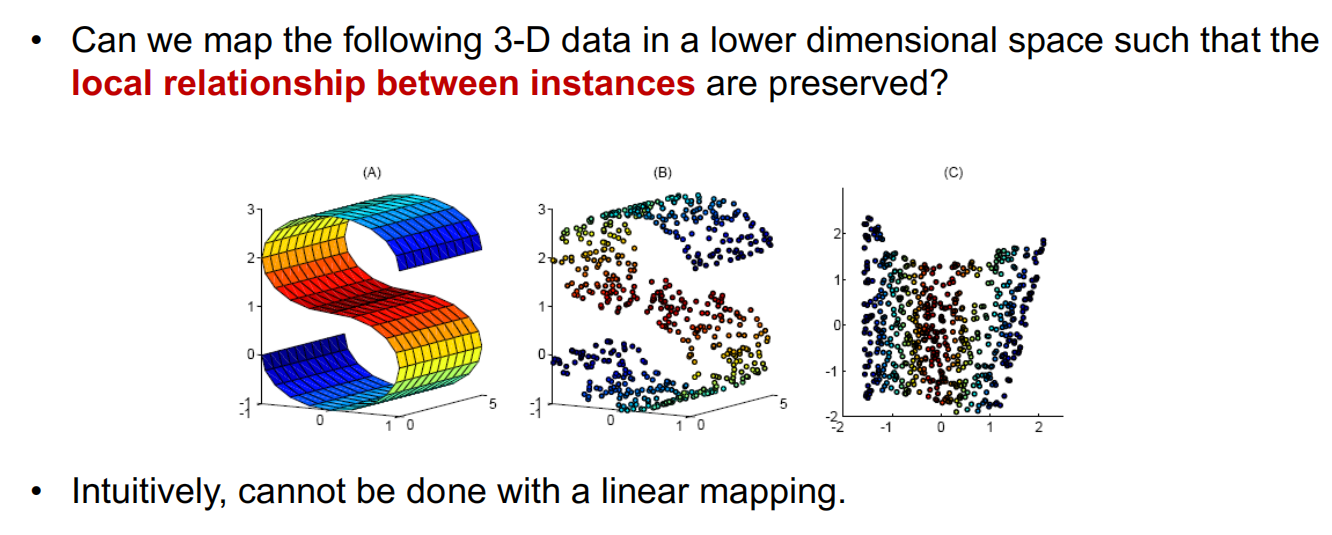
- Idea flow:
- Identify nearest neighbors for each instance
- Calculate the linear weights for each instances to be reconstructed by its neighbors
- $\varepsilon(W)=\underset{i}{\sum}|X_i-\underset{j}{\sum} W_{ij} X_j|^2$
- Use W as the local structure information to be preserved (i.e., fix $W$), find the optimal values (say $Y$) for $X$ in the lower dimensional space.
- $\Phi (Y)=\underset{i}{\sum} |Y_i - \underset{j}{\sum} W_{ij} Y_j|^2$
Lecture 8. Recommender System
Outline
- Overview of recommender system (RS)
- How does RS do recommendation?
- How to build a RS?
Overview of recommender system (RS)
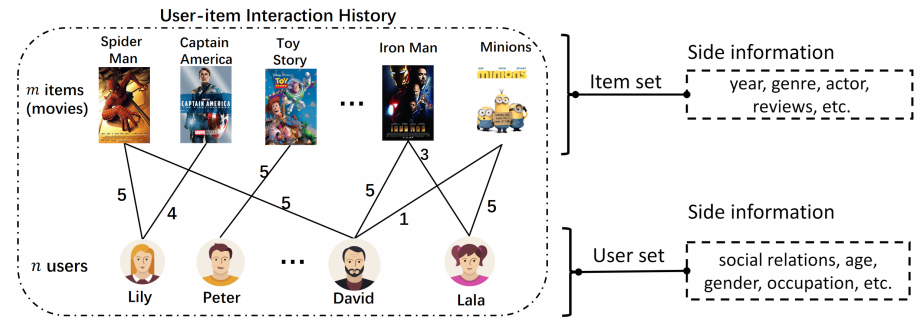
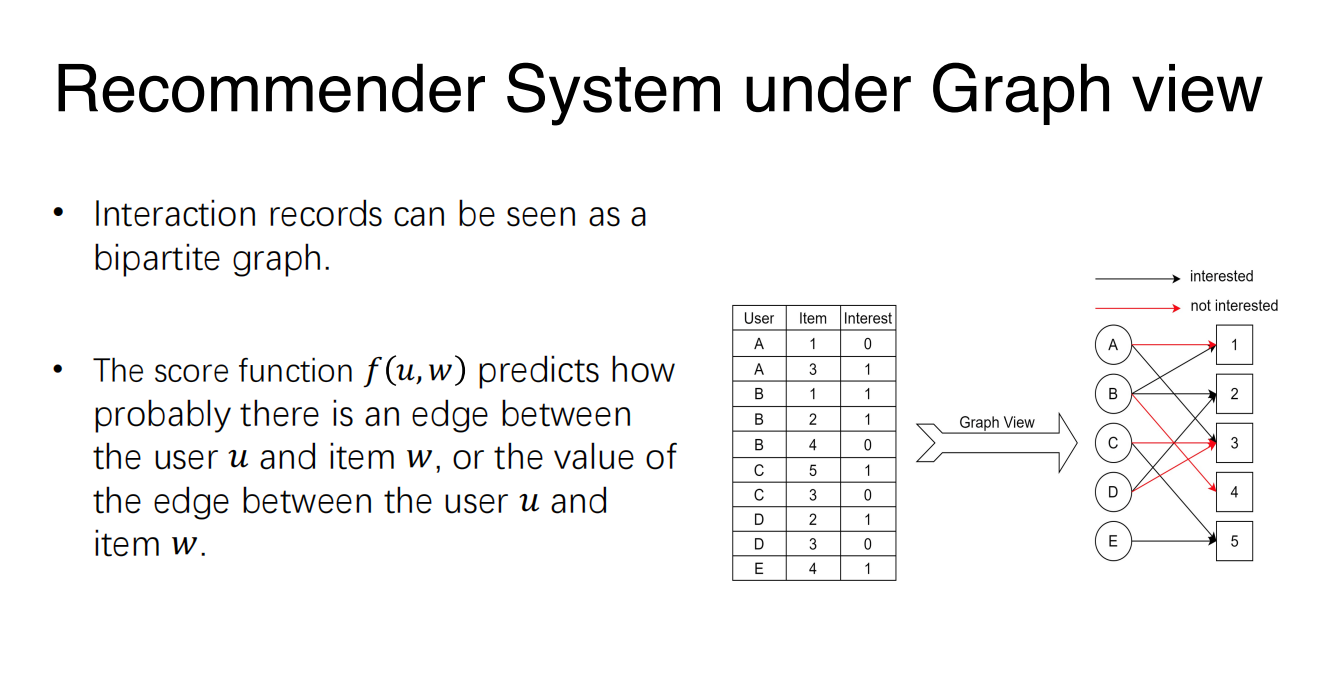
- Recommender System recommend new items to its user.
- Based on ?
- The items that the user has been interacted. [根据相似物品]
- The users who have been interacted with same items which this user also been interacted. [根据相似用户]
- The recommendation is personalized.
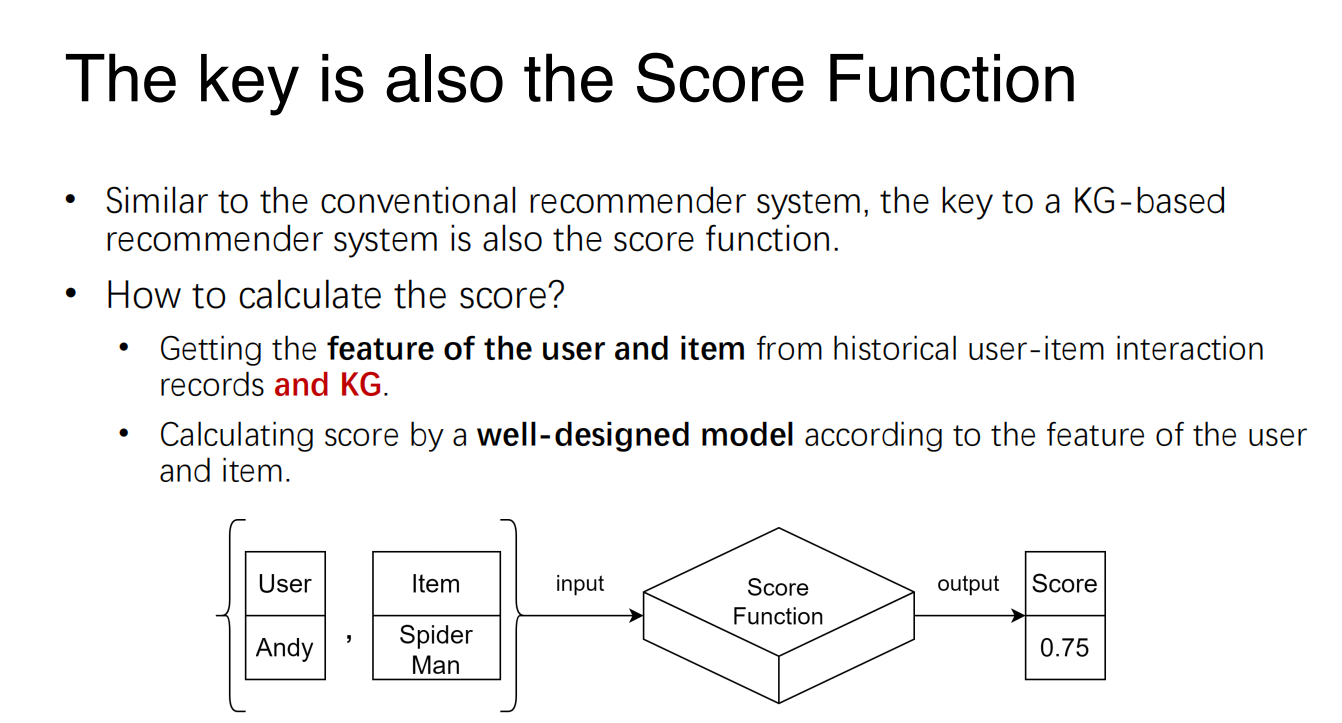
- The key of Recommender System is a score function.
- Input: a user and an item.
- Return value: a score, indicating how likely the user would be interested in the item.
How does RS do recommendation?
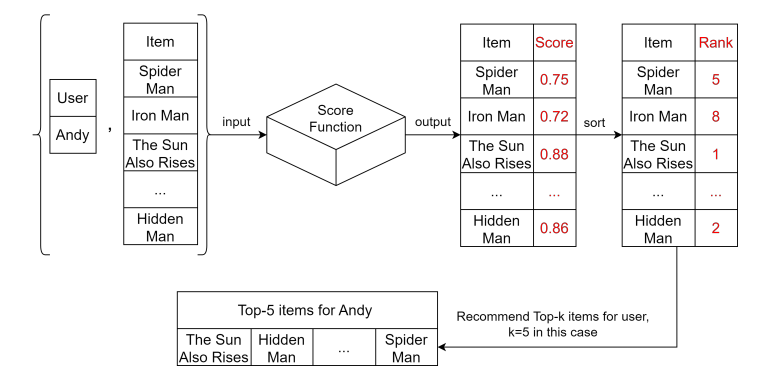
- RS basically estimate the probability of interaction between a user and an item,
- The score function is essentially a
model trained with data</font>. - In practice, the score function could be very complicated since
- The RS needs to be efficient (make recommendations in seconds)
- In many applications, we may have millions of users and items
- There is always a trade-off between efficiency and accuracy
How to build a RS?
Problem Formulation
- Input: Historical user-item interaction records or additional side information (e.g. user’s social relations, item’s knowledge, etc.)
- Output: The score function
Typical methods
- Content-based method:
- The very basic idea: build a regression/classification model for each user
- Focusing on the side information of the items (i.e., attributes, features of items)
- Suggesting items by comparing their features to a user’s past behaviors
- The very basic idea: build a regression/classification model for each user
- Collaborative Filtering method:
- Predicting user preferences based on the behaviors of other users.
- Based on the historical user-item interaction data
- Hybrid method: Combination of CF-based and Content-based method
CF-based method
- Attributes/features of users and items are not available,
- How to build the regression/classification model (as the score function)?
- Learning representation of users and items
Represented by correlation
- Represent the user/item by its correlation with the other users/items.
- Users with similar historical interactions are likely to have the same preferences.
- Items that are interacted by similar users are likely to have hidden commonalities (共性).
- A user/item is represented by a vector that consists of all the correlation between itself and all the users/items.
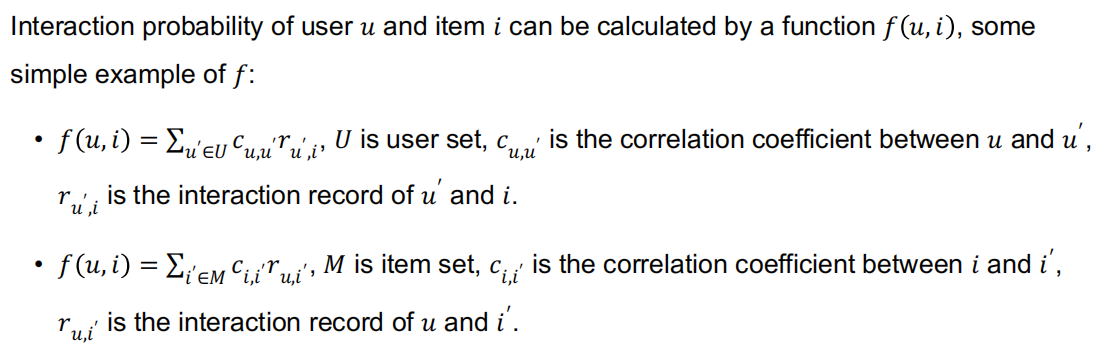
Q: How to define the correlation between 2 users or items?
A: Pearson Correlation Coefficient, a normalized measurement of the covariance
$
c_{u_1u_2}=\large\frac{\underset{i\in M}{\sum} (r_{u_1,i} - \bar{r}_{u_1}) (r_{u_2,i} - \bar{r}_{u_2}) }{\sqrt{\underset{i\in M}{\sum} (r_{u_1,i} - \bar{r}_{u_1})^2} \sqrt{\underset{i\in M}{\sum} (r_{u_2,i} - \bar{r}_{u_2})^2}}
$
- An example of user’s Pearson Correlation Coefficient
- $M$: The item set
- $r_{u,i}$: Interaction record between user $u$ and item $i$
- $\bar{r}_u$: Mean value of all the interaction records of user $u$
- Advantage: high interpretability
- It is easy to explain why the system recommend the item to the user.
- Disadvantage: low scalability
- What if there are millions of users and millions of items?
- High-dimensional, sparse feature representation
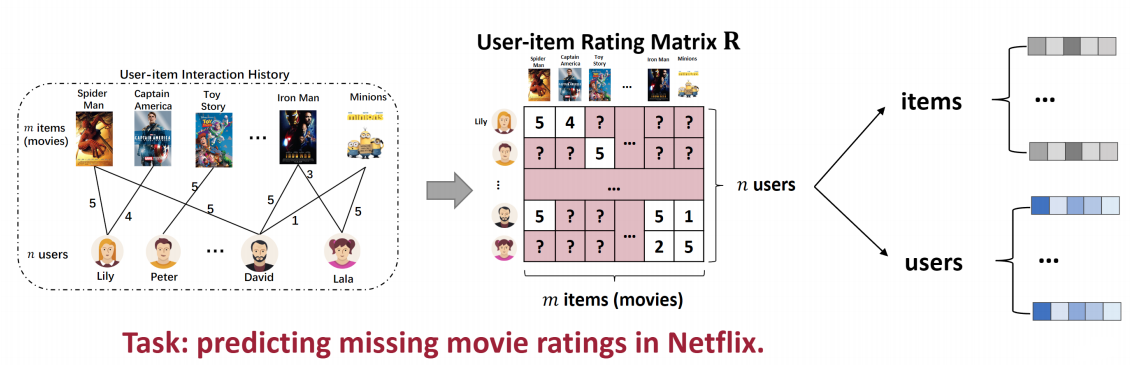
Represent by matrix factorization
- A matrix $R\in \mathbb{R}^{n\times m}$ approximate to the product of two matrix:
$
R\approx PQ^T ,\ P\in \mathbb{R}^{n\times d},\ Q\in \mathbb{R}^{m\times d}
$
- Representing the user and item as a $d$-dimension vector
- Matrix $P$, $Q$ consist of the representation vectors of all the users and items.
- The low-dimension vector representation is also called as embedding vector.
$
\underset{P,Q}{\min} \underset{r_{u,i} \in R’}{\sum} ||r_{u,i} - r’_{u,i} ||,\ \text{where } r’_{u,i} = P_u Q_i^T
$
- In this “objective function”, $P_u$ is user $u$’s embedding vector, $Q_i$ is item $i$’s embedding vector
- $r’_{u,i} = f(P_u, Q_i) = P_uQ_i^T$ is a simple example for this function.
- If we replace the matrix multiplication with a complex model $M$, such as MLP
- objective function will be : $\large\underset{P,Q,M}{\min} \underset{r_{u,i}\in R’}{\sum} ||r_{u,i}-f(P_u, Q_i, M)||$
- The model with higher complexity may have better prediction performance in big data scenario (as an optimization)
Lecture 9. Automated Machine Learning
Tuning Hyper-parameters
How to tune the hyper-parameters?

- Grid Search
- Too costly
- More efficient ways?
- Use heuristic Search (e.g., using Black-Box optimization algorithms)
- Sometimes, good surrogate of generalization is available to accelerate the evaluation
Too short ? Sorry, my lecture slides is only 6 pages.
Lecture 10. Logical Agents
Outline
- Knowledge-based Agents
- Represent Knowledge with Logic
- (Propositional) Logic
- Inference with Propositional Logic
Knowledge-based Agents
Agent Components
- Intelligent agents need knowledge about the world to choose good actions/decisions.
- Knowledge = {sentences} in a knowledge representation language (formal language).
- A sentence is an assertion about the world.
- A knowledge-based agent is composed of:
- Knowledge base: domain-specific content.
- Inference mechanism: domain-independent algorithms.
Agent Requirements
- Represent states, actions, etc.
- Incorporate new percepts
- Update internal representations of the world
- Deduce hidden properties of the world
- Deduce appropriate actions
Declarative approach to building an agent
- Add new sentences: Tell it what it needs to know
- Query what is known: Ask itself what to do - answers should follow from the KB
Use a game as an example:
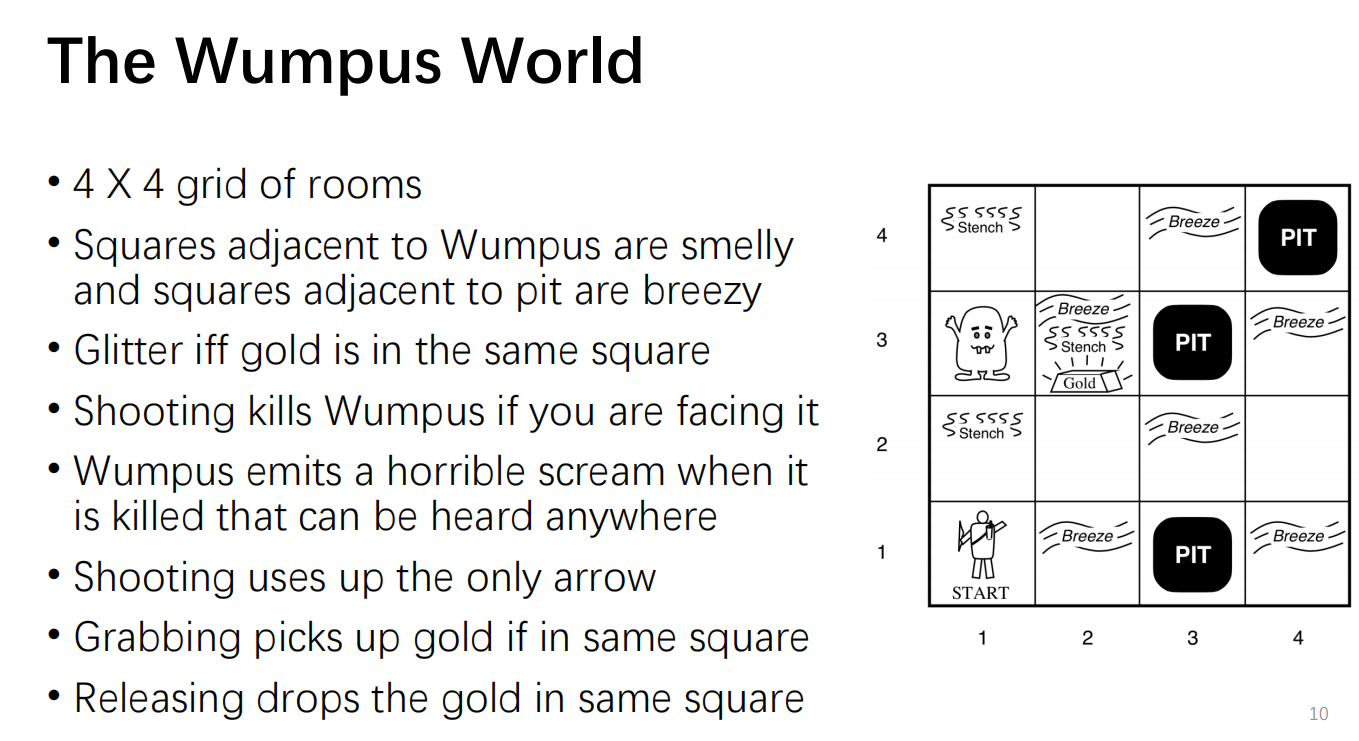
- Actuators:
- Left turn, Right turn, Forward, Grab, Release, Shoot
- Sensors:
- Stench, Breeze, Glitter, Bump, Scream
- Represented as a 5-element list
- Example: [Stench, Breeze, None, None, None]
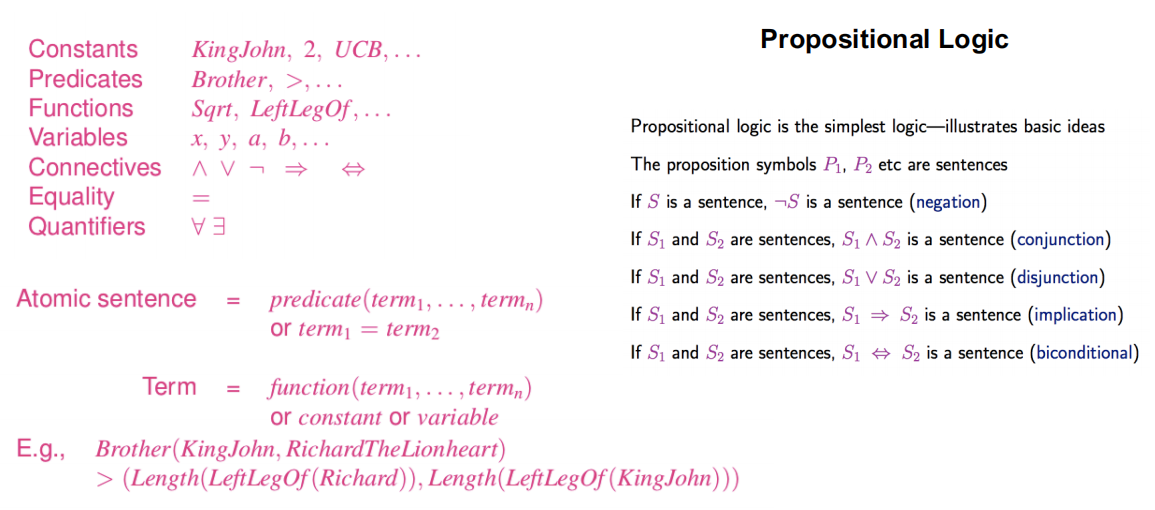
Represent Knowledge with Logic
- Knowledge base: a set of sentences in a formal representation
- Syntax: defines well-formed sentences in the language
- Semantic: defines the truth or meaning of sentences in a world
- Inference: a procedure to derive a new sentence from other ones.
 |
 |
Inference
- Inference: the procedure of deriving a sentence from another sentence
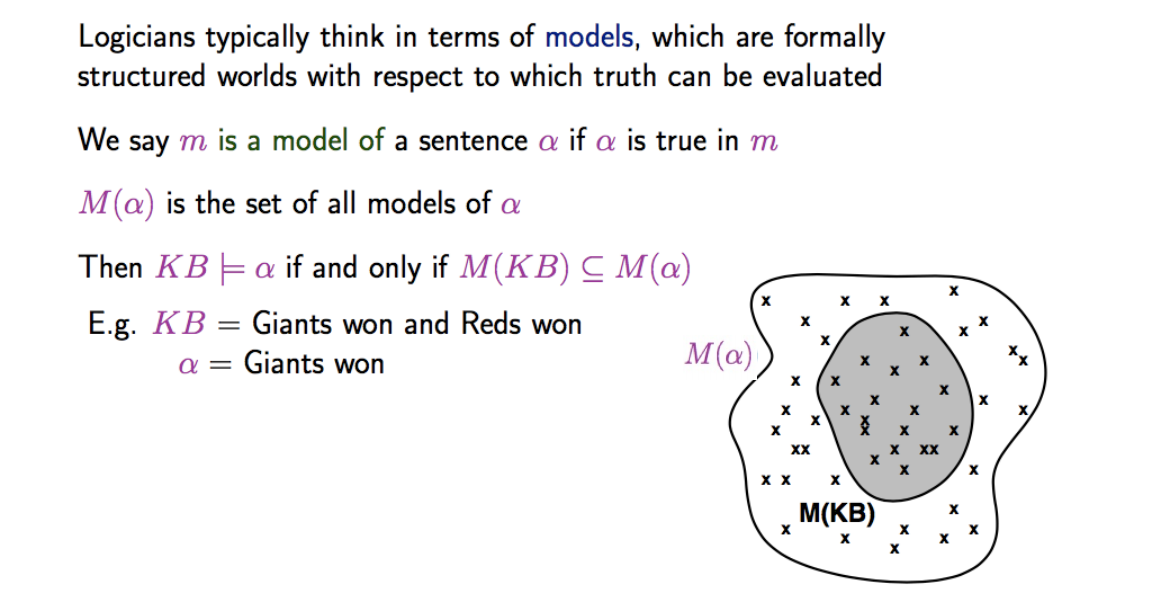
- Model Checking: A basic (and general) idea to inference
Propositional Logic
Most have been learnt in CS201 Discrete Mathemetics
Def. A proposition is a declarative statement that’s either True or False.
- Recall:
- Negation
- AND
- OR
- Implication
- Biconditional, etc.
Inference with Propositional Logic
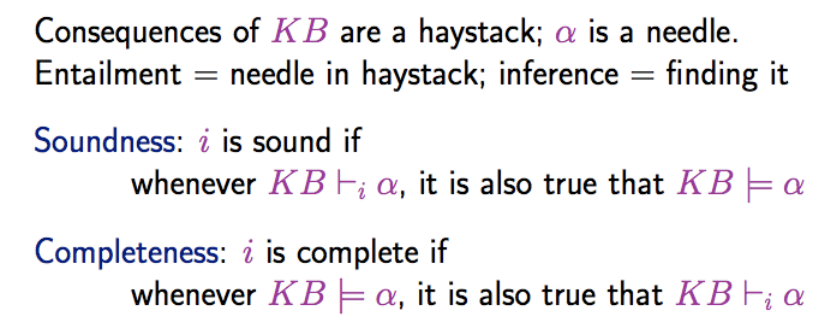
- Our inference algorithm target:
- Sound: oes not infer false formulas, that is, derives only entailed sentences.
- $\{ \alpha | KB \vdash \alpha \} \subseteq \{ \alpha | KB \models \alpha \}$
- Complete: derives ALL entailed sentences.
- $\{ \alpha | KB \vdash \alpha \} \supseteq \{ \alpha | KB \models \alpha \}$
- That is, we want a Logical Equivalent: $p\equiv q$
Go review some Inferences instance:
e.g. Modus Ponens, Modus Tollens, etc.
Inference as a search problem
- Initial state: The initial KB
- Actions: all inference rules applied to all sentences that match the top of the inference rule
- Results: add the sentence in the bottom half of the inference rule
- Goal: a state containing the sentence we are trying to prove.
- Completeness Issue: if the inference rules to use are not sufficient, the goal can not be obtained.
How to ensure soundness ?
- The idea of inference is to repeat applying inference rules to the KB.
- Inference can be applied whenever suitable premises are found in the KB.
What aboud completeness ?
- Two ways to ensure completeness:
- Proof by resolution: use powerful inference rules (resolution rule)
- Forward or Backward chaining: use of modus ponens on a restricted form of propositions (Horn clauses)
Proof by resolution
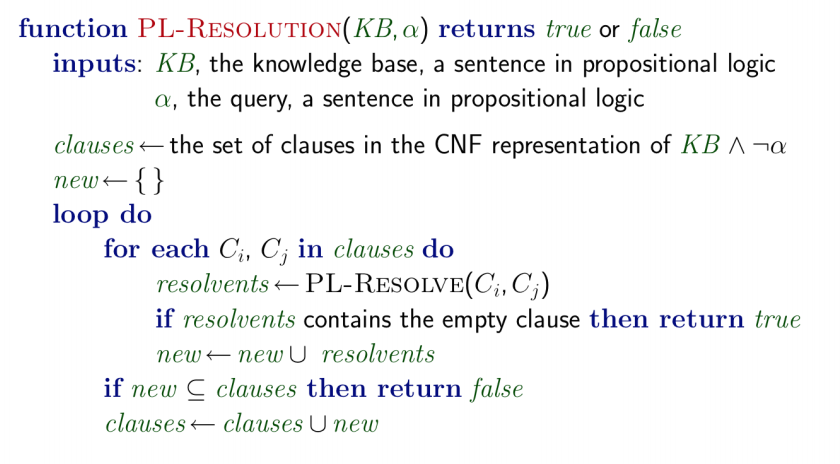
- Two cases to end loop:
- there are no new clauses that can be added, in which case $KB$ doesn’t ential $\alpha$; or,
- two clauses resolve to yield the empty clause, in which case $KB$ entails $\alpha$
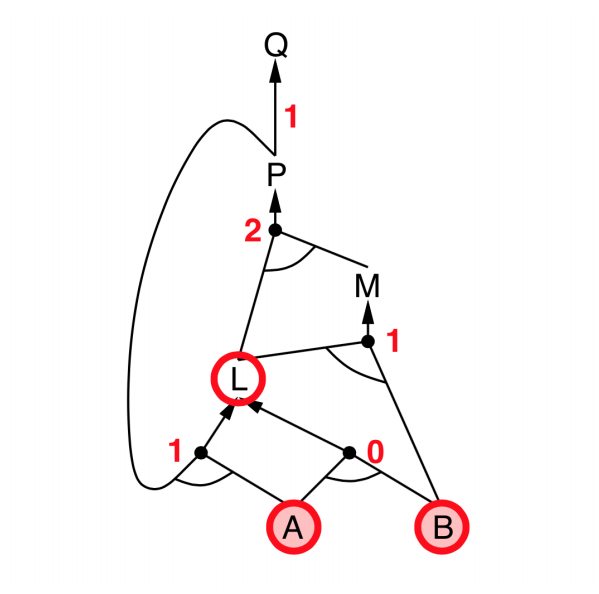
Forward chaining
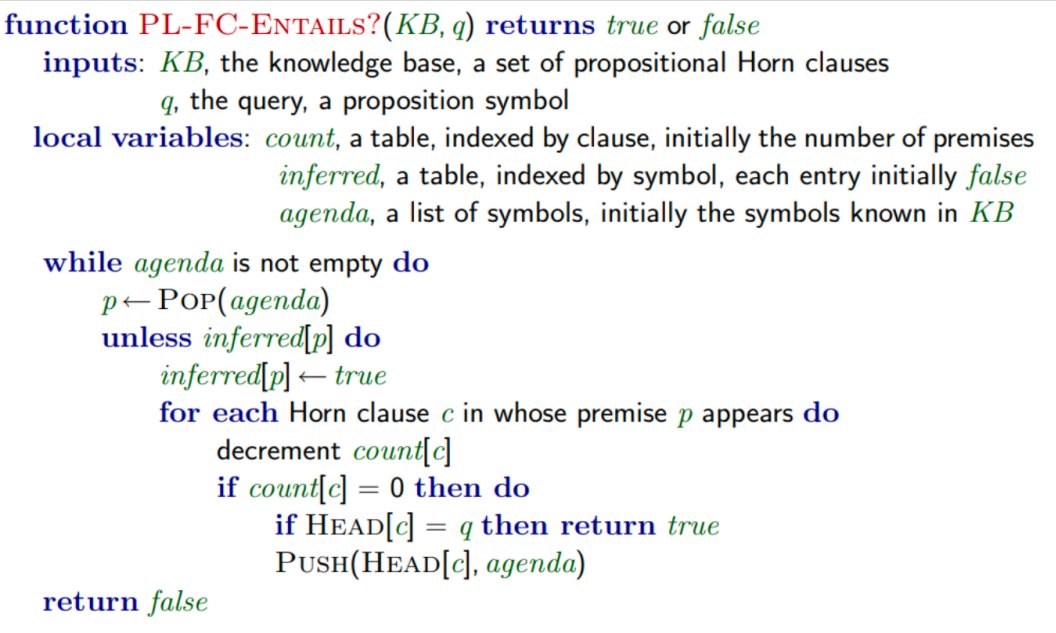
- Idea: Find any rule whose premises are satisfied in the $KB$, add its conclusion to the KB, until query is found
 |
 |
 |
 |
 |
 |
 |
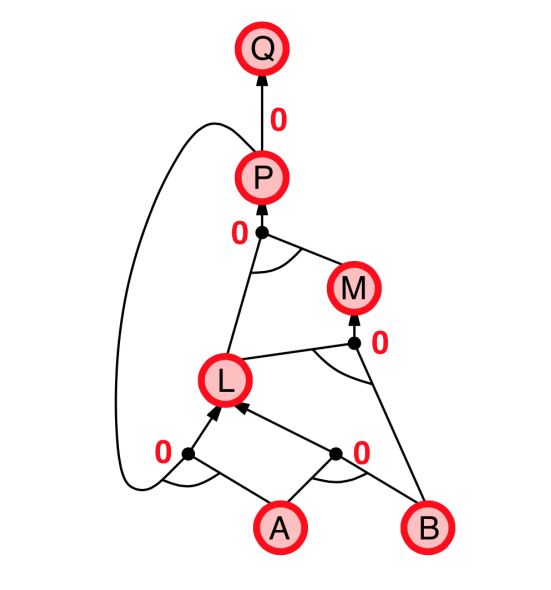 |
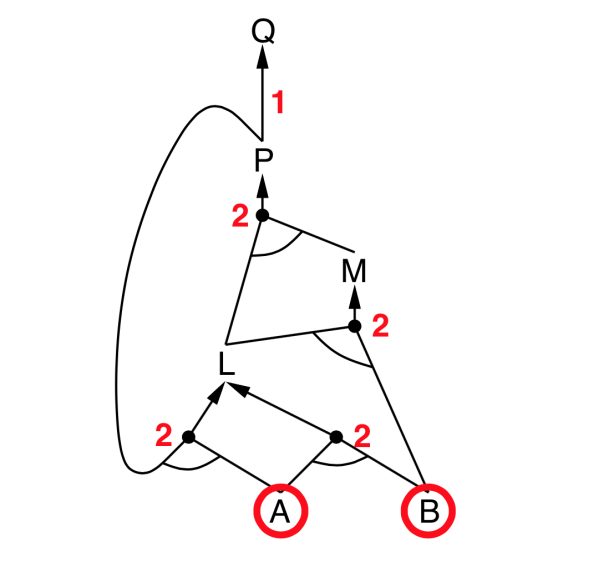
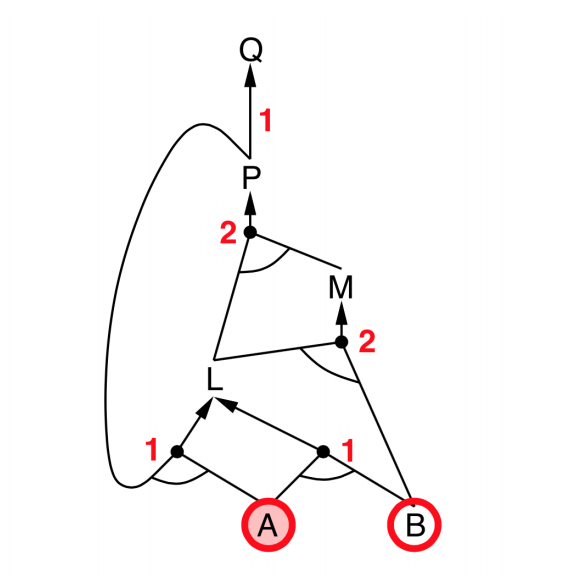
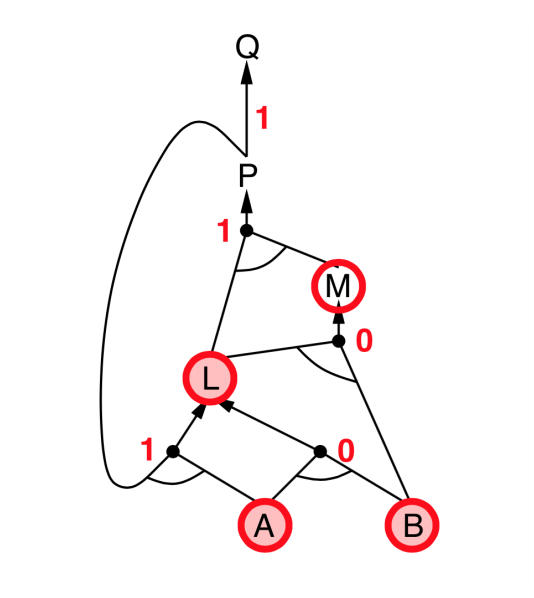
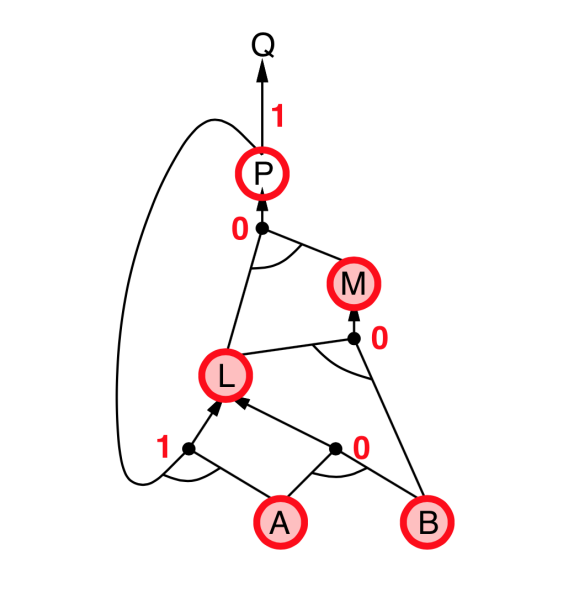
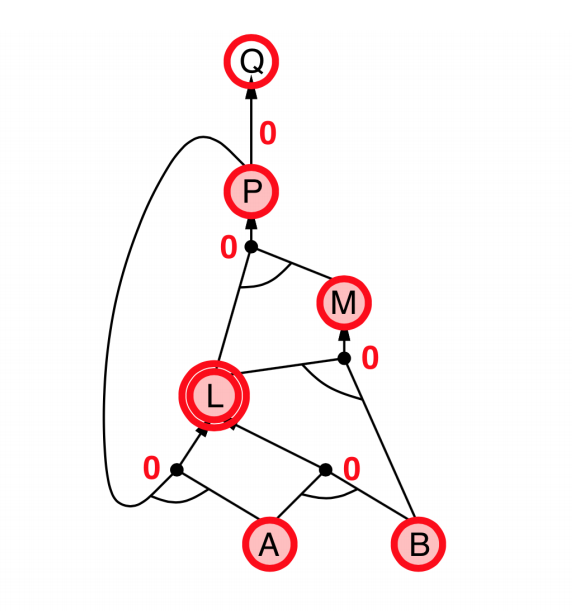
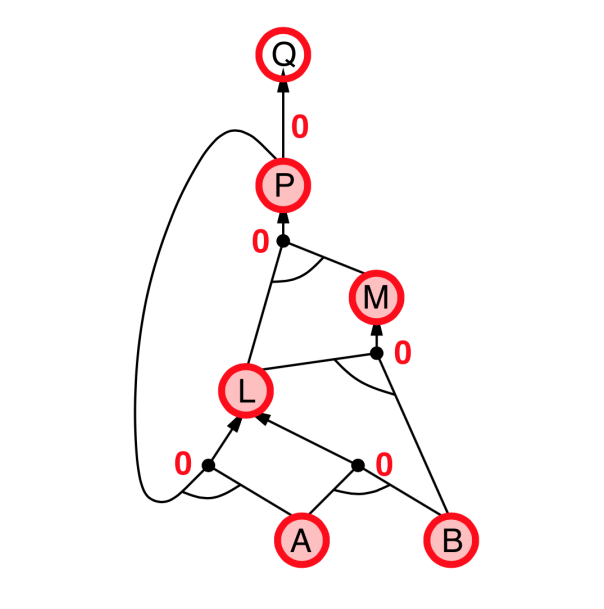
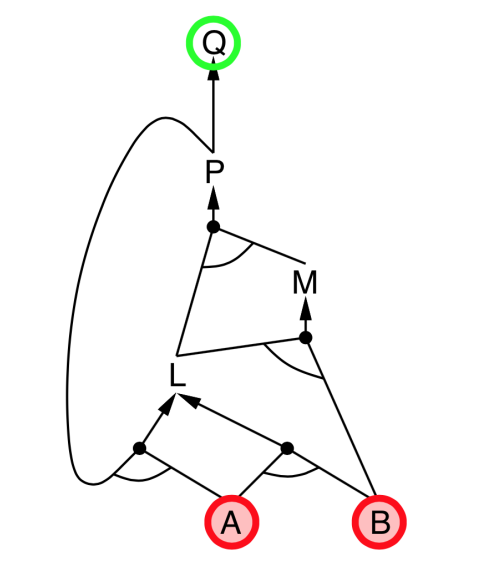
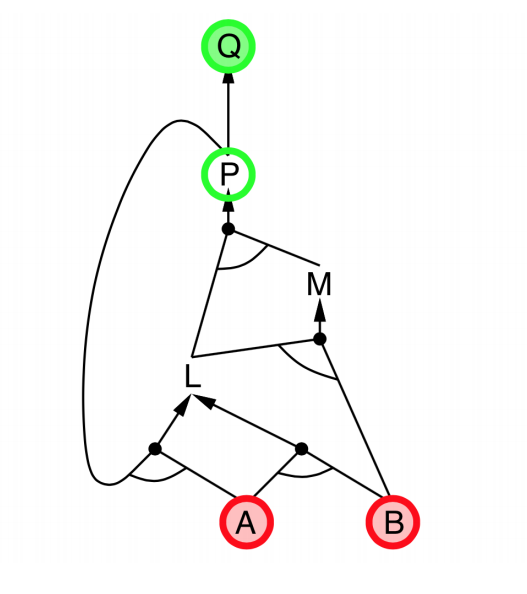
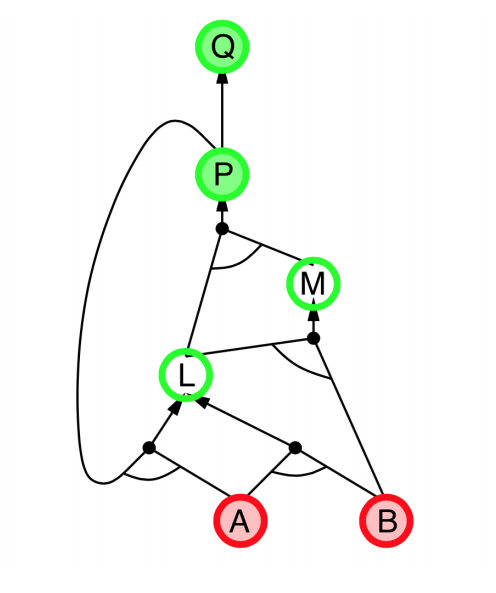
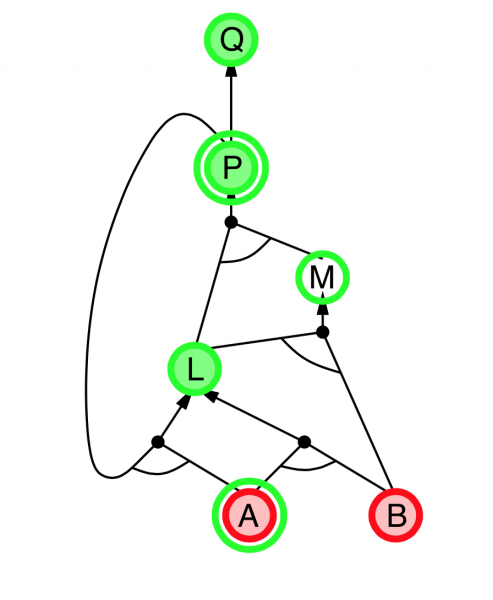
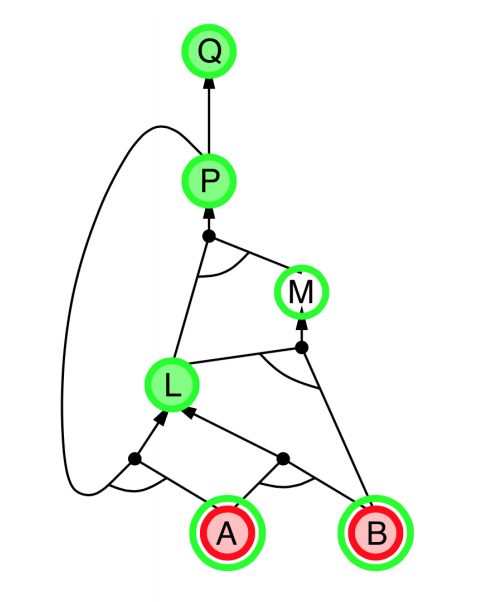
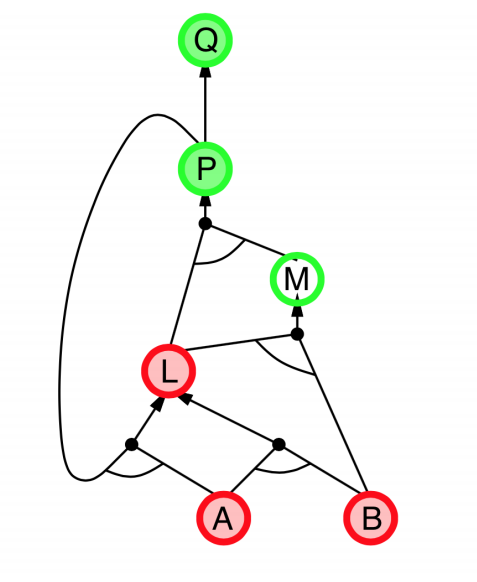
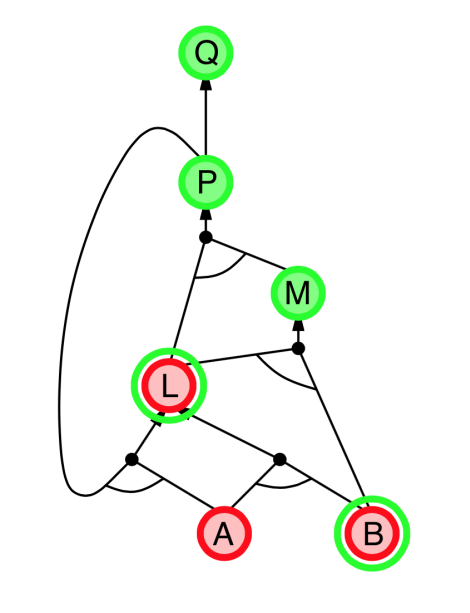
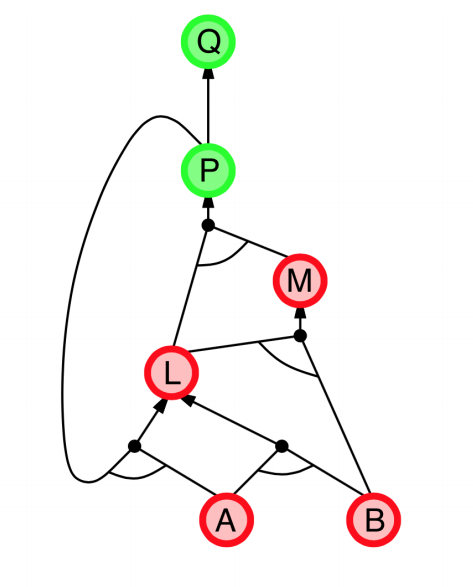
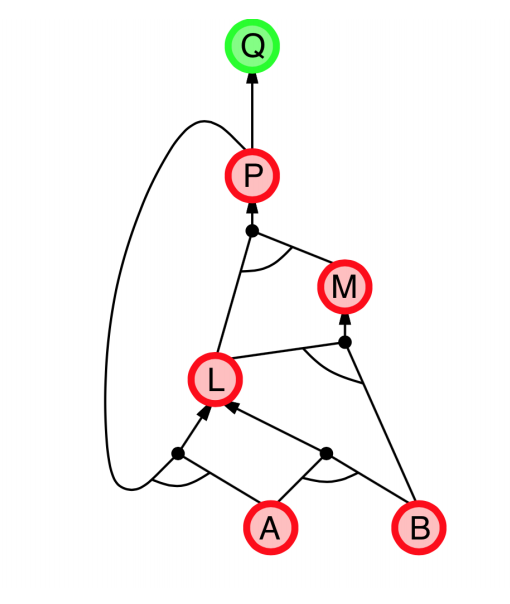
Backward chaining
- Idea: Works backwards from the query $q$
- To prove $q$ by Backward Chaining:
- Check if $q$ is known already, or
- Prove by Backward Chaining all premises of some rule concluding $q$.
- Avoid loops: check if new subgoal is already on the goal stack
- Avoid repeated work: check if new subgoal
- has already been proved true, or
- has already failed
 |
 |
 |
 |
 |
 |
 |
 |
 |
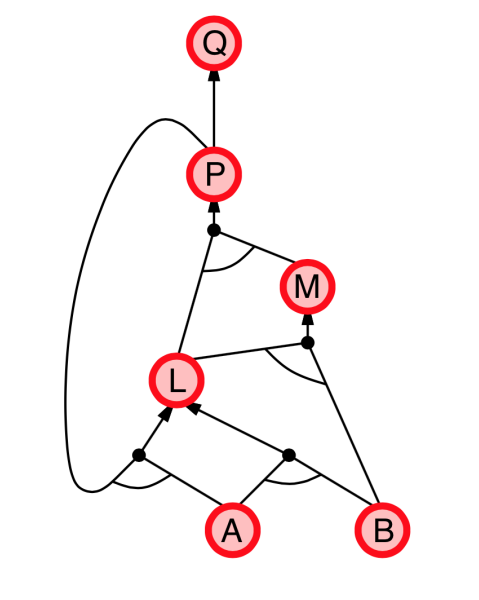 |
- Explanation:
- start from query $Q$, and $A$, $B$ has been known.
- check recursively each node that “should be proved right”
- for one node:
- if its “successors” wait to be proved (e.g. L 👈 P, A)
- or it’s unknown (neither “green” nor “red”), then avoid it
- else this node is proved (turn “red”)
- Suppose: B is unknown
- then step 5 (want to prove L 👈 A, B) failed
- and L cannot be proved, and query $Q$ failed immediately too.
Forward vs. Backward
- Forward chaining:
- Data-driven, automatic, unconscious processing,
- May do lots of work that is irrelevant to the goal
- Backward chaining:
- Goal-driven, appropriate for problem-solving,
- Complexity of BC can be much less than linear in size of KB
DPLL
The DPLL algorithm is similar to Backtracking for CSP, but using various problem dependent information/heuristics, such as Early Termination, Pure symbol heuristic and Unit clause heuristic.
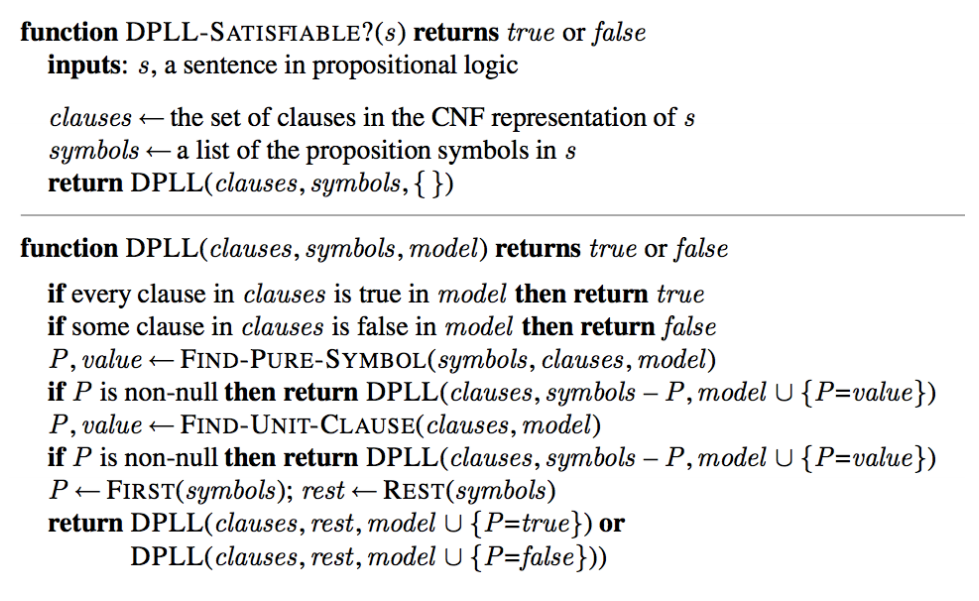
概念介绍:如下的式子被称为合取范式(CNF),式子中只包含逻辑与,逻辑或和逻辑非,且每个部分由逻辑与连接
$(a\vee b\vee \neg c)\wedge \cdots \wedge (a\vee d \vee \neg d)$
- 括号部分为该公式的子句(clause),每个子句中的变量或变量的否定为文字(literal/symbol)
- 要使整个公式为 True,则每个子句都必须为 True,也就是说,每个子句中至少有一个文字为 True
- DPLL 算法简化步骤实际上就是移除所有在赋值后值为 True 的子句,以及所有在赋值后值为 False 的文字。
- 简化步骤分两步:孤立文字消去(Pure Symbol)和单位子句传播(Unit Clause)
- In pure symbol elimination, we try to find symbols that only appear once in all clauses.
- If the symbol is in form $a$ (positive), then it’s assigned to True ;
- If the symbol is in form $\neg a$ (negative), then it’s assigned to False ;
- then we check the clause containing this symbol if it’s true or false. (try to eliminate)
- In unit clause propagation, we try to find clauses with only one literal, or clauses with one literal that is unknown (and it must cause the whole clause unknown).
- E.g. $(a\vee b\vee c\vee \neg d)\wedge (\neg a\vee c)\wedge (\neg c\vee d)\wedge (a)$
- find $a$ as unit clause, then we say $a$ must be True, and reduce the sentence $\to (c)\wedge (\neg c\vee d)\wedge (a)$ ;
- then find $c$ as unit clause, same process $\to (c)\wedge(d)\wedge(a)$ ;
- E.g. $(a\vee b\vee c\vee \neg d)\wedge (\neg a\vee c)\wedge (\neg c\vee d)\wedge (a)$
- At last, we got a
modelwith some assigned literal. That’s the solution we want.
Summary
- Inference with Propositional Logic 👉 we want an inference algorithm that is:
- sound (does not infer false formulas), and
- ideally, complete too (derives all true formulas).
- Limits ?
- PL is not expressive enough to describe all the world around us. It can’t express information about different object and the relation between objects.
- PL is not compact. It can’t express a fact for a set of objects without enumerating all of them which is sometimes impossible.
Review: First Order Logic (learnt in Discrete Mathematics)
- Concept of Syntax, Semantics, Entailment(necessary truth of one sentence given another), etc.
Forward, backward chaining are linear in time, complete for horn clauses. Resolution is complete for propositional logic.
Pros
- Intelligibility of models: models are encoded explicitly
- Cons
- Do not handle uncertainty
- Rule-based and do not use data (Machine Learning)
- It is hard to model every aspect of the world
Lecture 11. First Order Logic
Inference with FOL
Basic concept of FOL
Three basic component: Objects, Relations, Functions
- Recall:
- Universal Instantiation, Existential Instantiation, etc.
- Reduce FOL to simple format
- Better Ideas to Inference with FOL: Unification
- Resolution
- Chaining Algorithms (In lec 10.)
Lecture 12. Representing and Inference with Uncertainty
Outline
- Uncertainty and Rational Decisions
Uncertainty and Rational Decisions
- Alternative to Logic
- Utility theory: Assign utility to each state/actions
- Probability theory: Summarize the uncertainty associated with each state
- Rational Decisions: Maximize the expected utility (Probability + Utility)
- Thus we need to represent states in the language of probability
- In a word, use probability to replace logic.
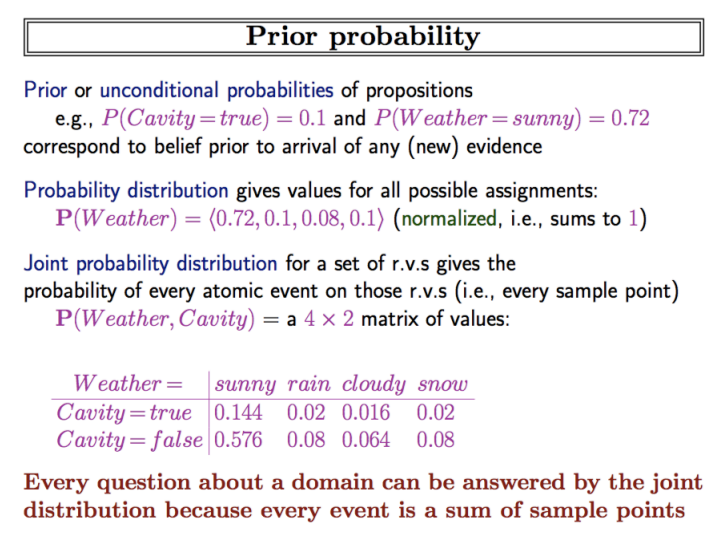
Basic Probability Theory and Usage
 |
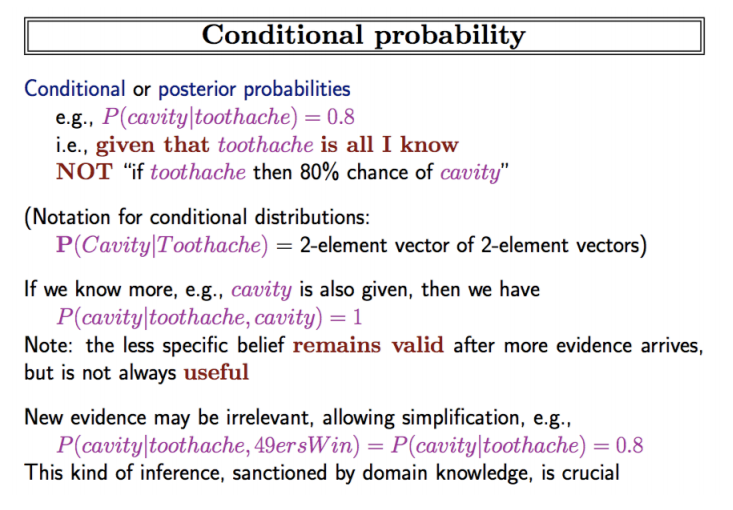 |
Recall: MA212 概率论与数理统计
贝叶斯公式,条件概率,联合概率等
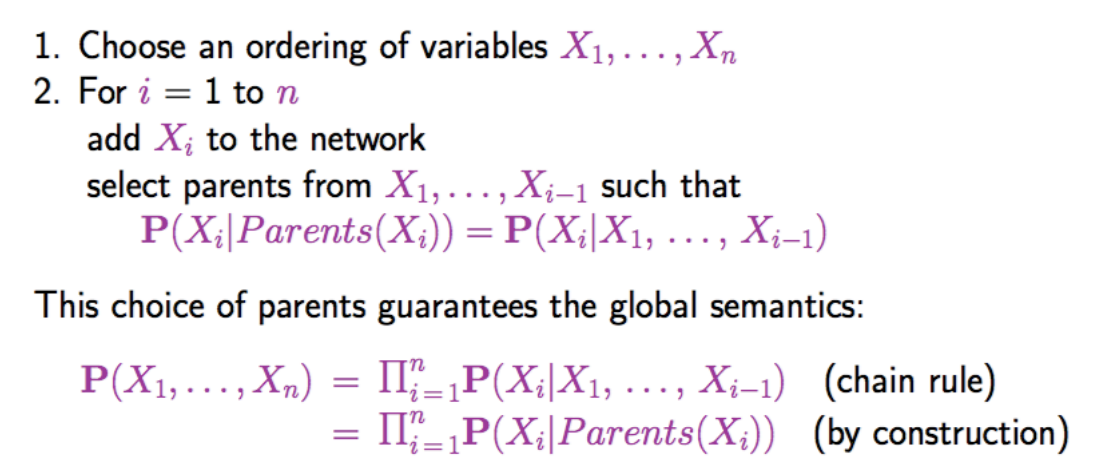
Bayesian Networks
- What is a BN ?
- A Directed Acyclic Graph (DAG).
- Each node is a random variable, associated with conditional distribution.
- Each arc (link) represent direct influence of a parent node to a child node.
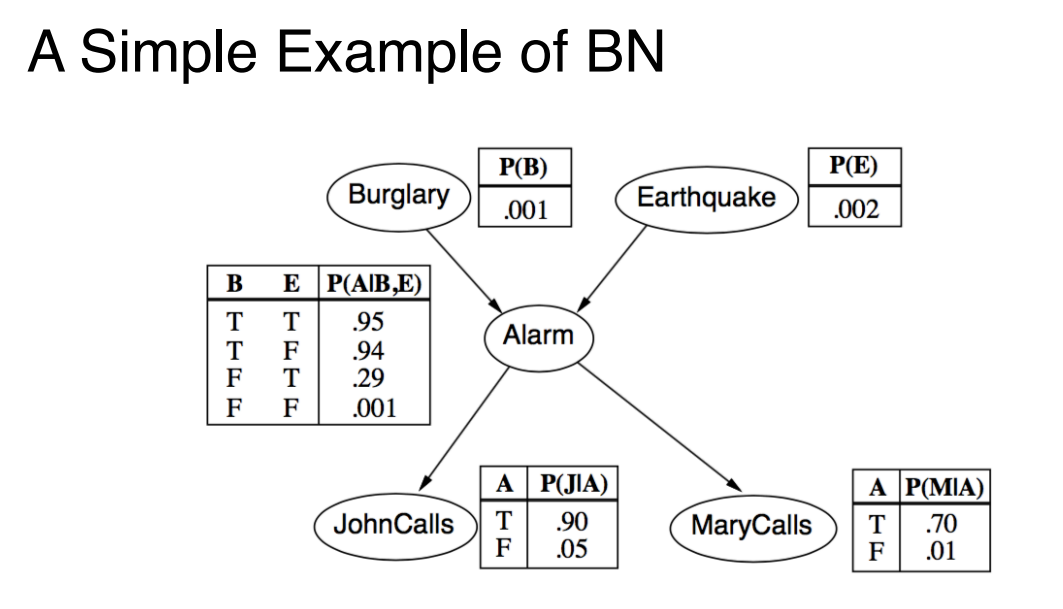
- In the above exmaple, a Conditional Probability Table (CPT) is construct for each node
- Easier to utilize independence and conditional dependence relations to define the joint distribution.
- How to construct a CPT for BN?
Inference with BN
- Given a Bayesian Network, and an (or some) observed events, which specifies the value for evidence variables, we want to know the probability distribution of one (or several) query variables $\color{red}X$, i.e. $P(X | \text{events})$
- First we try enumeration (calc all possible cases)
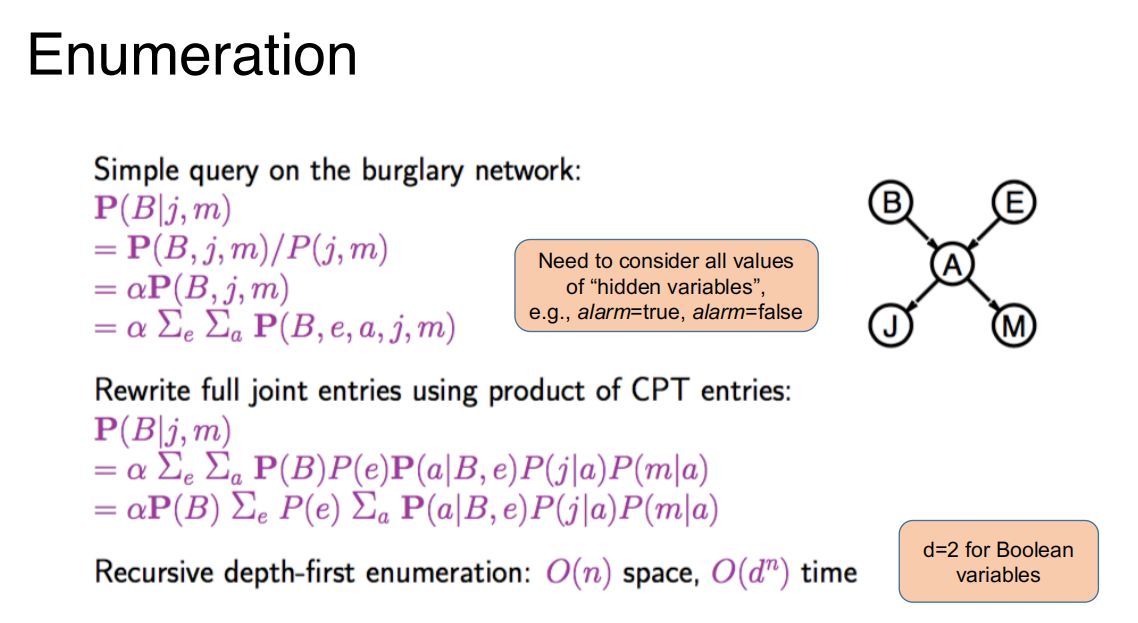
- and it’s time consuming.
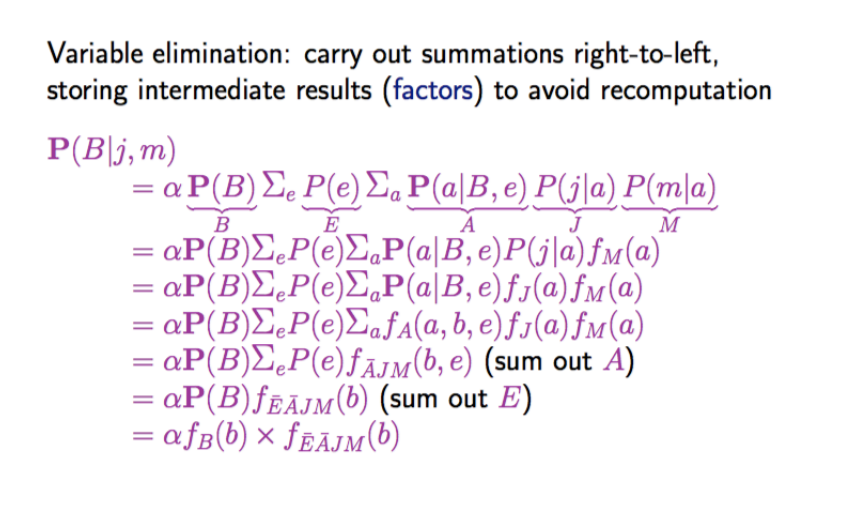
- A way to simplify: Enumeration by Variable Elimination
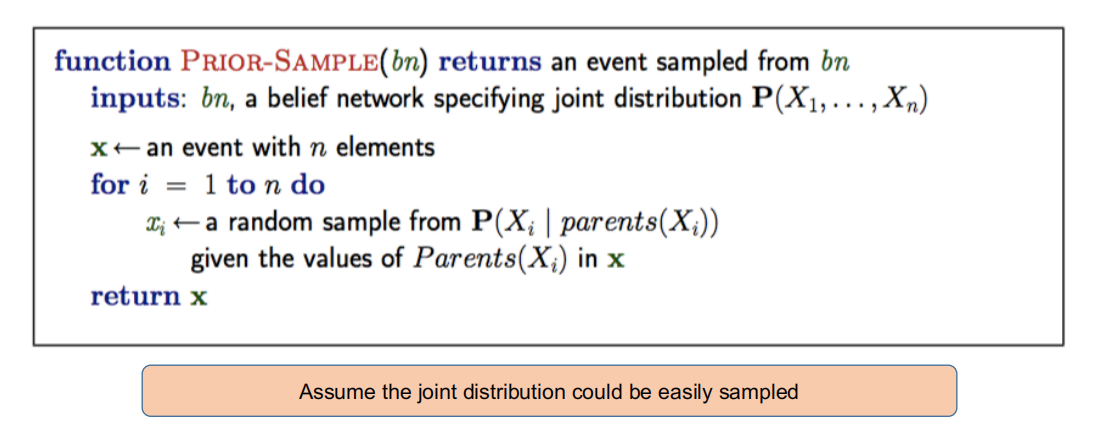
Approximate Inference with BN
- Basic Idea:
- Draw N samples from a sampling distribution $S$
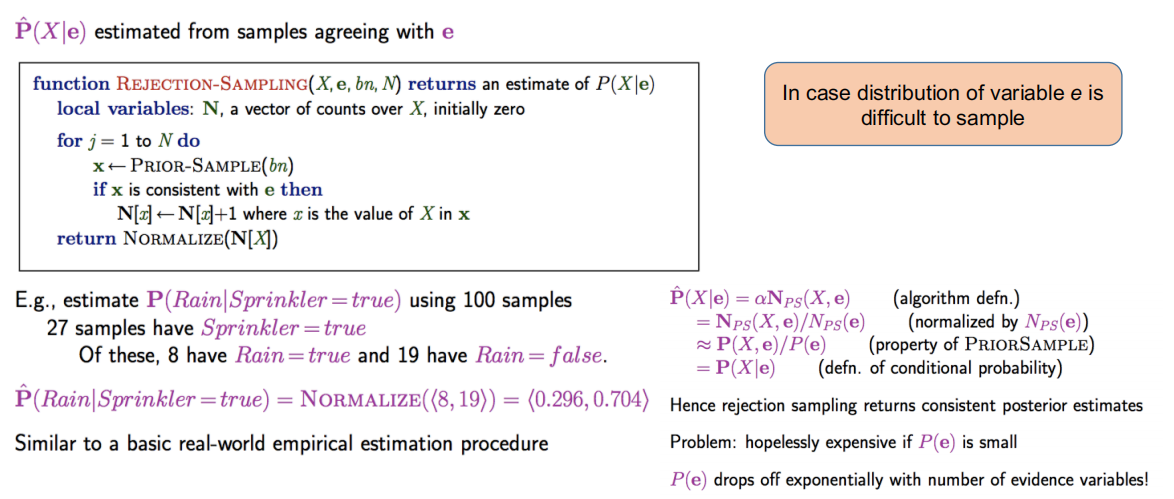
- Compute an approximate posterior probability (后验概率) $\hat{P}$
- Show this converge to the true probability $P$
- Outline
- Sampling from an empty network
- Rejection sampling: reject samples disagreeing with evidence
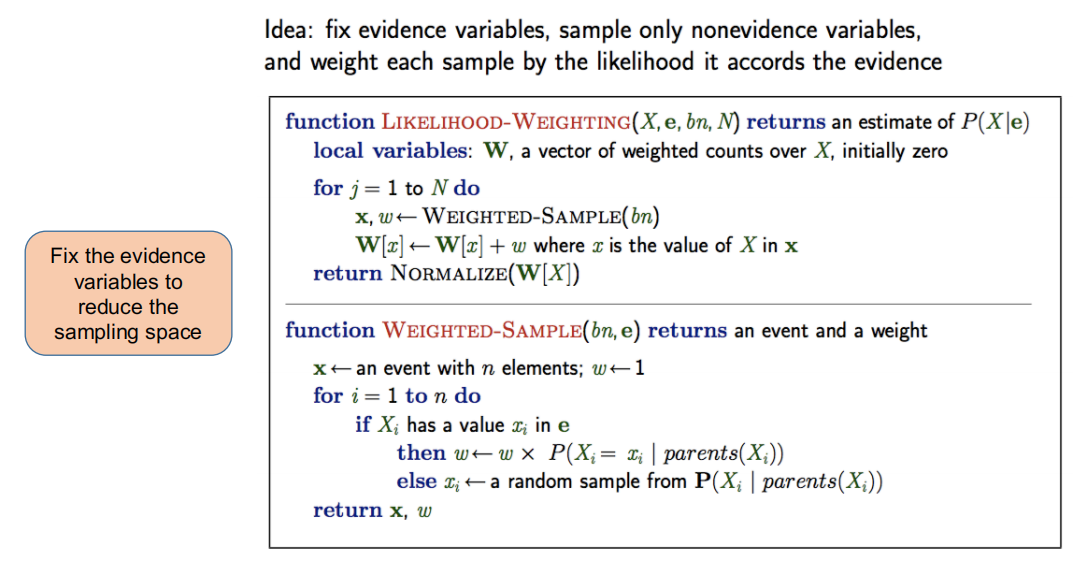
- Likelihood weighting: use evidenve to weight samples
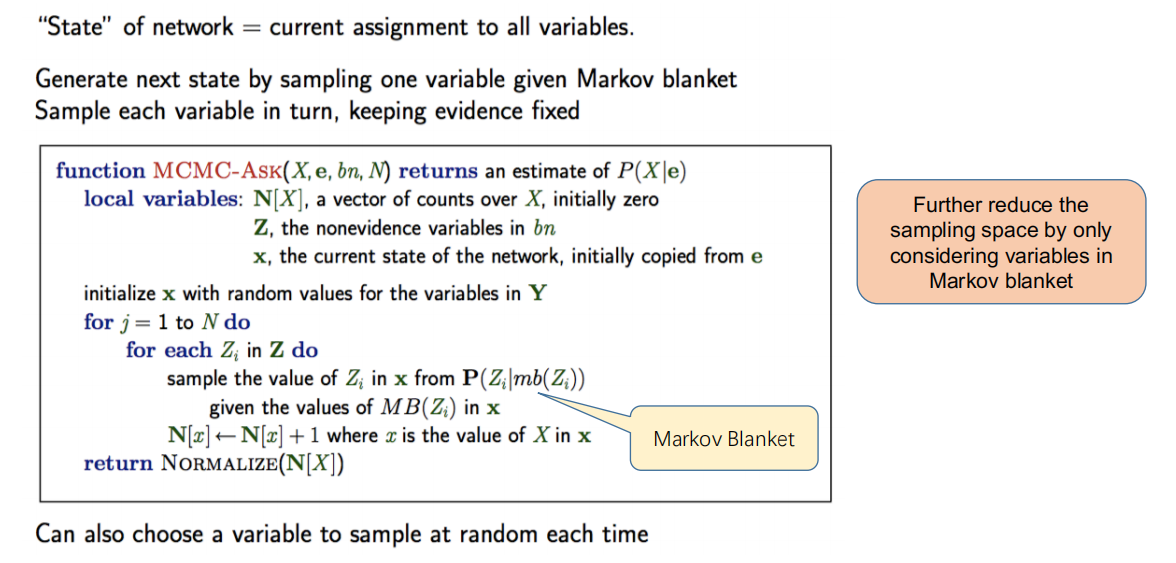
- Markov Chain Monte Carlo (MCMC): sample from a stochastic process (随机过程) whose stationary distribution is the true posterior.
Sampling from an empty network
Rejection Sampling
Likelihood Weighting
MCMC
How to construct a BN (or KB in general) ?
- Challenge
- Big Data
- Methods
- Structural Learning
- Parameter Estimation
- Similar to Neural Networks
- Structural Learning: Identify the network structure
- Parameter Estimation: find VALUEs for parameters associated with an edge
- Depending on how you define the relationship between events/nodes
- values in a CPT
- parameters of a probability density function
- Depending on how you define the relationship between events/nodes
- A machine learning or search problem again.
Lecture 13. Knowledge Graph
Overview of Knowledge Graph (KG)
What is Knowledge Graph?
- To make a knowledge base (KB) of practical significance, we need to:
- Set a proper boundary for “knowledge”, which means:
- bound the scope of the KB (and thus its representation)
- bound the utility (application) of the KB
- Set a proper boundary for “knowledge”, which means:
- The idea of KG stems from Semantic Network.
- Knowledge Graph: Large-scale semantic network
- SN/KG uses vertexes and edges to represent knowledge graphically.
- Vertexes: entities and concepts
- Edges: relations and properties

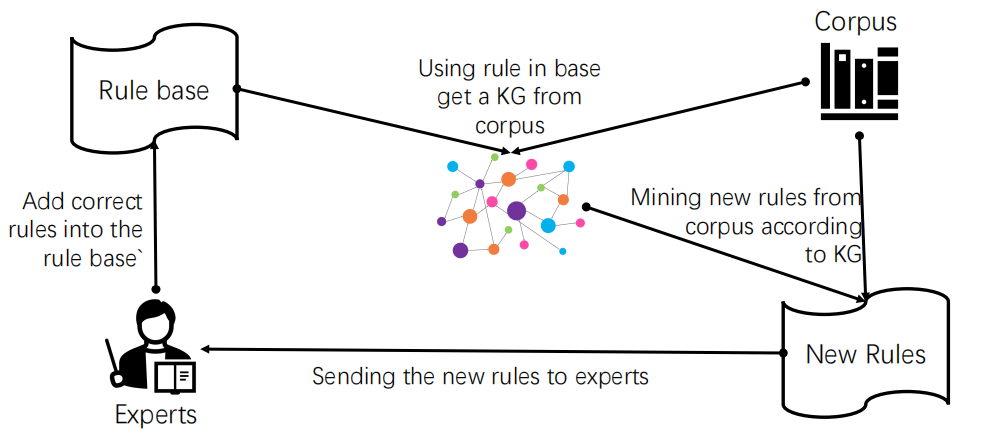
How to construct Knowledge Graph?
- Heterogeneous directed graphs.
- The KG can be represented as a graph $\mathcal{G}=(V,E)$ , $V$ is vertex set (entities set), $E$ is the edge set (relations set).
- RDF:Resource Description Framework, an XML Document standard from W3C
- use relation triplet
<head entity, relation type, tail entity>to describe a relation. - Head entity: the subject of this relation
- Relation type: the category of this relation
- Tail entity: the object of this relation
- use relation triplet
The General (Semi-)Automatic Viewpoint
Automatic Entity Recognition
- Identify meaningful entities based on the statistical metrics of vocabulary across various texts.
- Input: Documents (text)
- Output: A set of entities
- TF-IDF (Term Frequency–Inverse Document Frequency):
- Idea: If a word appears frequently in one document but infrequently in others, it is more likely to be a meaningful entity.
- For a corpus of documents:
- Term Frequency (TF): $P(w|d)$
- Inverse Document Frequency (IDF): $\log{\left(\frac{|D|}{|\{ d\in D|w\in d \}|}\right)}$
- TF-IDF: TF $\times$ IDF
- Entropy :
- Idea: If a word has a rich variety of neighboring words, it is likely be a meaningful entity
- $H(u) = - \sum_{x\in \mathcal{X}} p(x) \log{p(x)}$
- $p(x)$ is the probability of a certain left neighbor (right neighbor) word, $\mathcal{X}$ is the set of all left neighbor (right neighbor) characters of $u$.
- The larger $H(u)$ is, more abundant the set of $u$’s neighbors is.
- Idea: If a word has a rich variety of neighboring words, it is likely be a meaningful entity
Also, some ML techniques can solve the NER(Name Entity Recognition) tasks. Considering input is a sentence, output is the label of each word in the sentence.
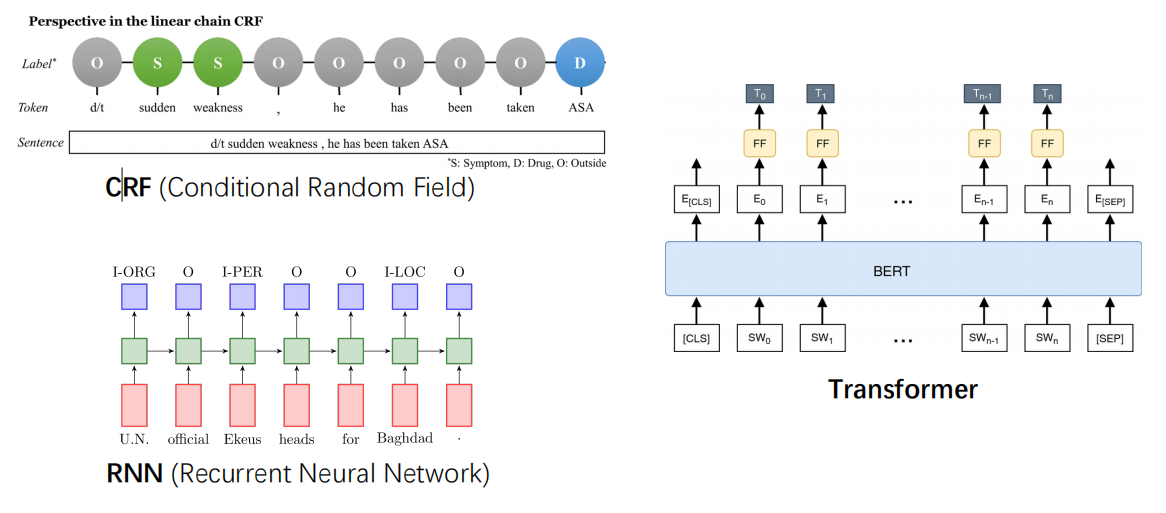
Automatic Relation Extraction
By recognizing entities, now AI should “learn” about relations.
- Using machine learning techniques, model the Relation Extraction process as a Text Classification Problem.
- It’s also a supervised learning task.
- Input is a sentence that contains 2 entities. Output is the category of the relation that the sentence express.
- Input: Zihan Zhang will join the ICPC.
- Output: participate in
- Relation extraction task can be solved by the following technologies:
- RNN, Transformers, …
Knowledge Graph Completion
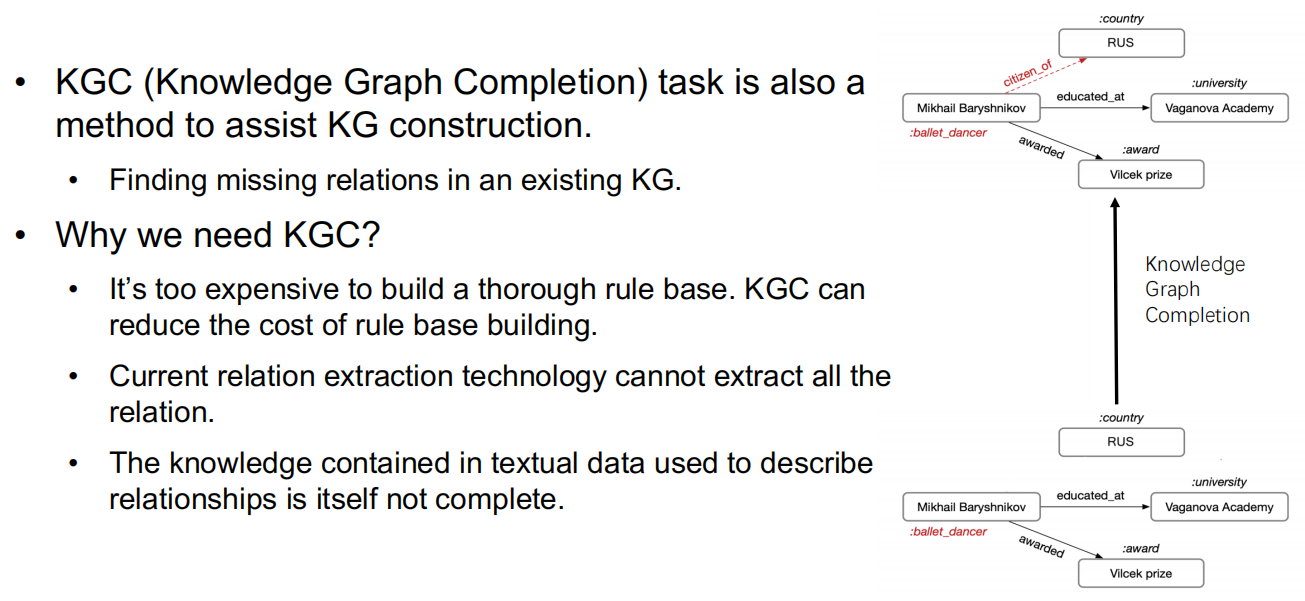
- 2 ways for completion task
- Path-based method
- Embedding-based method
- Path-based is interpretable, so we skip it.
- Embedding-based methods represent the entities and relation types in the KG as a low-dimensional real value vector (also called embedding).
- Design a score function $\mathcal{g}(h,r,t)$. Get suitable embedding for entities and relation types.
- $h$, $r$, and $t$ are embeddings of head entity $h$, relation type $r$, and tail entity $t$ respectively.
- Higher $\mathcal{g}(h,r,t)$ means that the relation is more possible to be true.
- Design a score function $\mathcal{g}(h,r,t)$. Get suitable embedding for entities and relation types.
- How to get suitable embedding for entities and relation types?
- Consider: All the relations in the KG should have higher score than any relation that is not in the KG.
- Objective Function: $\min \underset{(h,r,t)\in \mathcal{g}}{\sum} \underset{(h’,r’,t’)\notin \mathcal{g}}{\sum} \left[\mathcal{g}(h’,r’,t’) - \mathcal{g}(h,r,t)\right]_{+}$
- Get suitable embedding by gradient descent.
KG-Based Recommender System
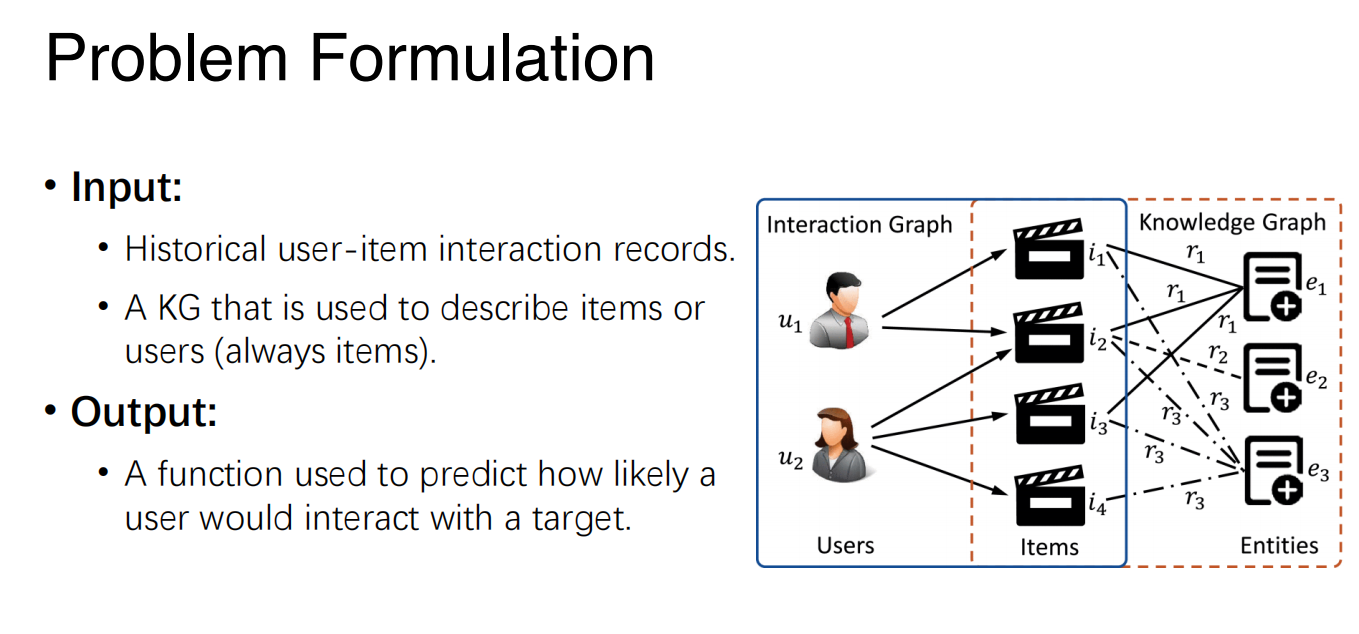
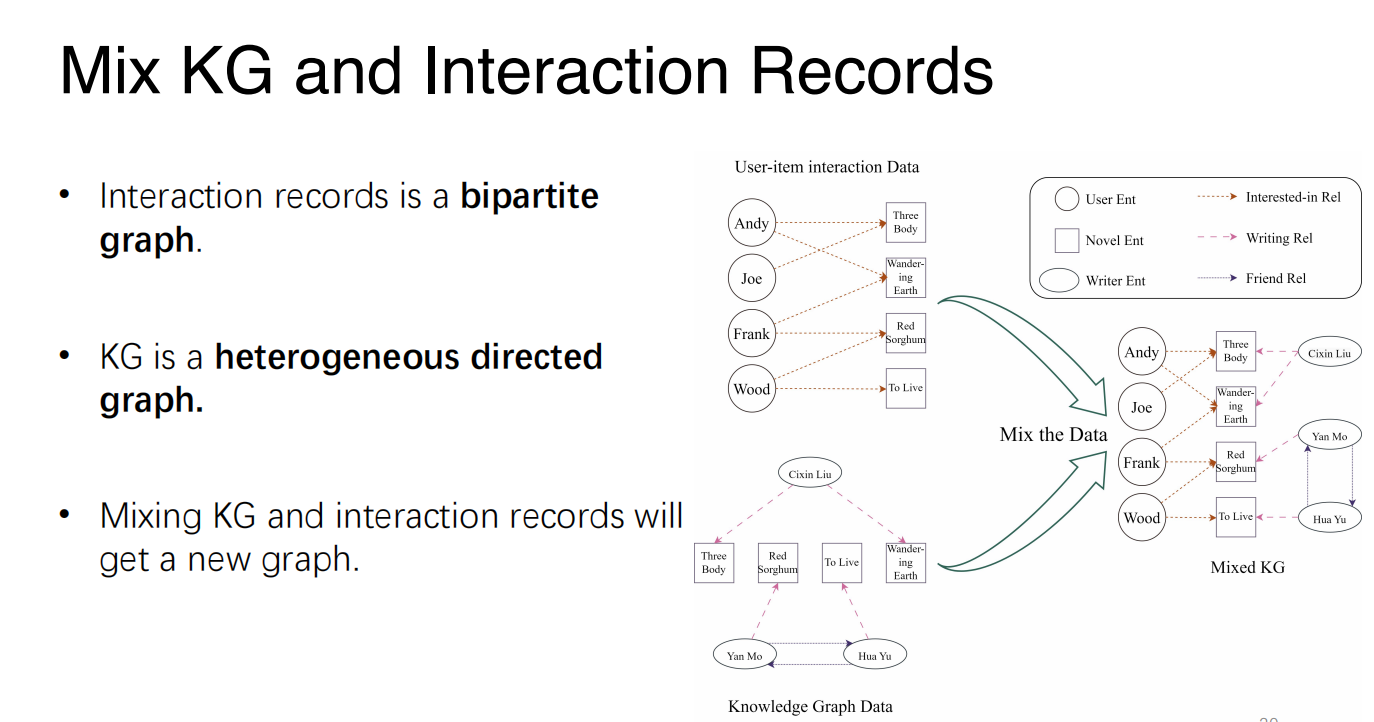
- We can get the feature of the user and item from the new graph that is mixed by KG and interaction records.
- A typical method is GNN (Graph Neural Network):
- There is an initial embedding for each node in the graph.
- The final embedding of each node is calculated by the embeddings of its neighborhood.
- Result of $f(u,w)$ is calculated according to the final embeddings of user
$u$ and item $w$ by a model $M$, such as MLP or matrix multiplication.
Review and Semester Summary
I can build a knowledge base here to tell you what we’ve learnt in AI course. 😂
Just a framework.
- Problem-solving
- Classical search
- Beyondclassical search
- Problem-Specific Search
- MachineLearning
- Supervised Learning
- Performance Evaluation
- Unsupervised Learning
- Automated Machine Learning
- Knowledge and Reasoning
- Representing and Inference with logic
- Representing and Inference with Uncertainty
- Knowledge Graph andRecommender System
Connection with Previous Courses
- In searching module, we use algorithm of graph, which we’ve learnt in DSAA.
- In ML module, we use knowledge in Big Data Course.
- Also we talked about FOL … which is in Discrete Mathemetic.
- In KG-RS module, we use knowledge in Probability Theory and Mathemetic Statistics.
- And the whole AI Course has strong connection to Calculus and Linear Algebra.
Therefore, if you want to learn AI well, these courses should be premises.
(Also said to me, a foolish student …)